Während der letzten Wochen hat sich der Marsrover Opportunity weiter in die südliche Richtung bewegt. Solander Point, so der Name der jetzt angepeilten Geländeformation, ist mittlerweile nur noch wenige hundert Meter entfernt. In den kommenden Monaten soll der Rover die dort befindlichen geschichteten Gesteinsformationen mit seinen Instrumenten im Detail untersuchen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, The Planetary Society, Unmanned Spaceflight, Malin Space Science Systems, Nature. Vertont von Peter Rittinger.
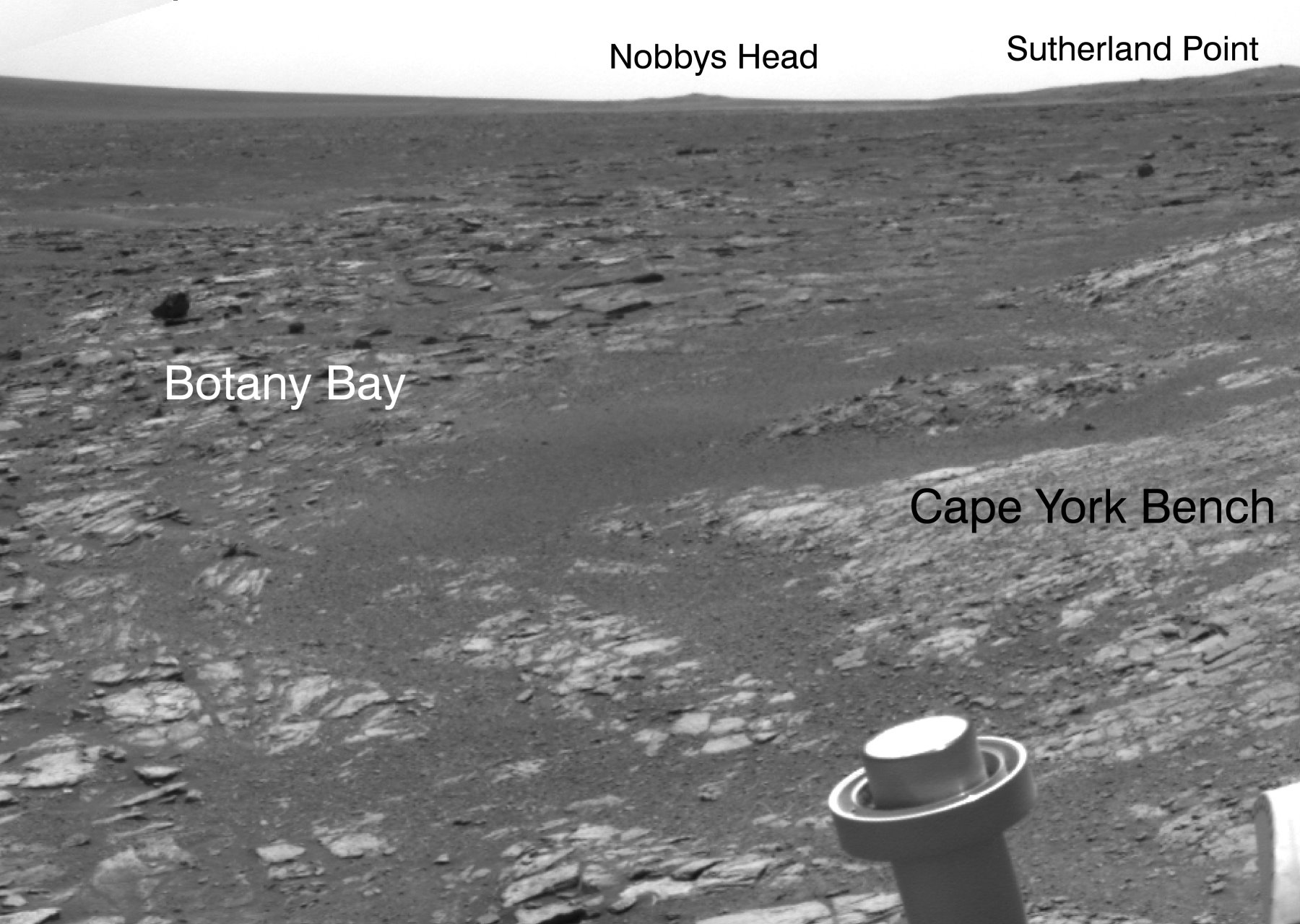
(Bild: NASA, JPL-Caltech)
Bereits am 13. Mai 2013, dem Sol 3307 seiner Mission, beendete der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Opportunity seine im August 2011 begonnene Untersuchung des „Cape York“. Bei dem Cape York handelt es sich um eine mehrere hundert Meter lange und nur wenige Meter über die Umgebung herausragende Geländeerhebung, welche sich direkt am westlichen Rand des etwa 22 Kilometer durchmessenden Endeavour-Kraters befindet.
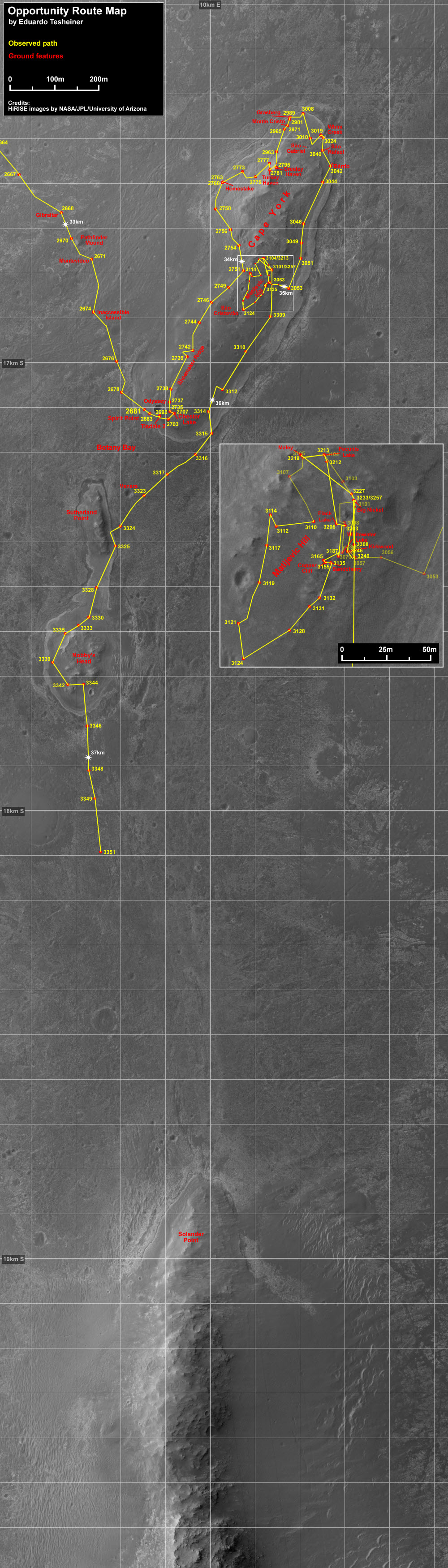
(Bild: NASA, JPL-Caltech, University of Arizona, Eduardo Tesheiner (UMSF-Forum))
Nach seiner Abfahrt vom Cape York (Raumfahrer.net berichtete) bewegte sich der Rover zunächst in die südwestliche Richtung und näherte sich dabei im Rahmen einer Serie von schnell aufeinander folgender Fahrten einem weiteren Segment des den Endeavour-Krater umgebenden, allerdings stark erodierten Ringgebirges. Der östliche Rand von „Sutherland Point“, so der Name dieser Geländeerhebung, wurde am 31. Mai durch eine Fahrt über 80 Meter erreicht.
Die folgenden Tage verbrachte Opportunity damit, dem östlichen Rand von „Sutherland Point“ in die südliche Richtung zu folgen. Neben der Anfertigung diverser Fotoaufnahmen der Umgebung wurde dabei stellenweise auch das vom Max-Planck-Institut für Chemie in Mainz entwickelte APX-Spektrometer eingesetzt, um die chemische Zusammensetzung der passierten Oberflächenbereiche zu ermitteln.
Computerprobleme
Am 9. Juni, dem Sol 3333 der Mission, erreichte Opportunity schließlich die unmittelbar südlich von „Sutherland Point“ gelegene Geländeerhebung „Nobby’s Head“ und führte auch hier diverse Untersuchungen durch. Unterbrochen wurden diese Arbeiten durch ein am 12. Juni aufgetretenes Problem mit dem Flash-Speicher des Bordcomputers des Rovers. Dieses letztmals am 28. Februar 2013 aufgetretene Problem macht sich dadurch bemerkbar, dass Daten nicht wie beabsichtigt im Flash-Speicher abgelegt und gespeichert werden können und der Bordcomputer dadurch bedingt einen Reboot ausführt.
Als Reaktion auf den dadurch ausgelösten Computer-Reset stoppte der Rover automatisch alle für diesen Tag vorgesehenen Aktivitäten – unter anderem wurde dadurch auch eine geplante Fahrt nicht durchgeführt – und versetzte sich stattdessen in einen als „Automode“ bezeichneten Zustand, in dem der Rover lediglich passiv auf der Marsoberfläche verharrte und auf weiterführende Kommandos von der Erde wartete.
Der Grund für diese in letzter Zeit öfters auftretenden Probleme, so die Mitarbeiter des für die Steuerung des Rovers verantwortlichen Jet Propulsion Laboratory (JPL) der NASA, liegt in der langjährigen Einsatzdauer des Bordcomputers, welcher seine „Garantiezeit“ bereits deutlich überschritten hat. Das Problem wird von den Ingenieuren und Technikern des JPL bisher allerdings nicht als bedrohlich eingestuft. Sollten solche Vorfälle in Zukunft allerdings öfters auftreten, so ist eventuell eine Formatierung des Flashspeichers erforderlich.
Am 15. Juni konnte Opportunity von den Ingenieuren des JPL wieder in den „normalen Betriebsmodus“ versetzt werden. Noch am selben Tag führte der Rover eine weitere Fahrt über 75 Meter durch. In den folgenden Tagen komplettierte der Rover die teilweise Umrundung von „Nobby’s Head“ auf dessen westlichen Seite. Die Südspitze von „Nobby’s Head“ wurde schließlich am 20. Juni erreicht. Bereits drei Tage später setzte Opportunity seine Forschungsreise über die Marsoberfläche im Rahmen einer 90-Meter-Fahrt in die südliche Richtung fort.
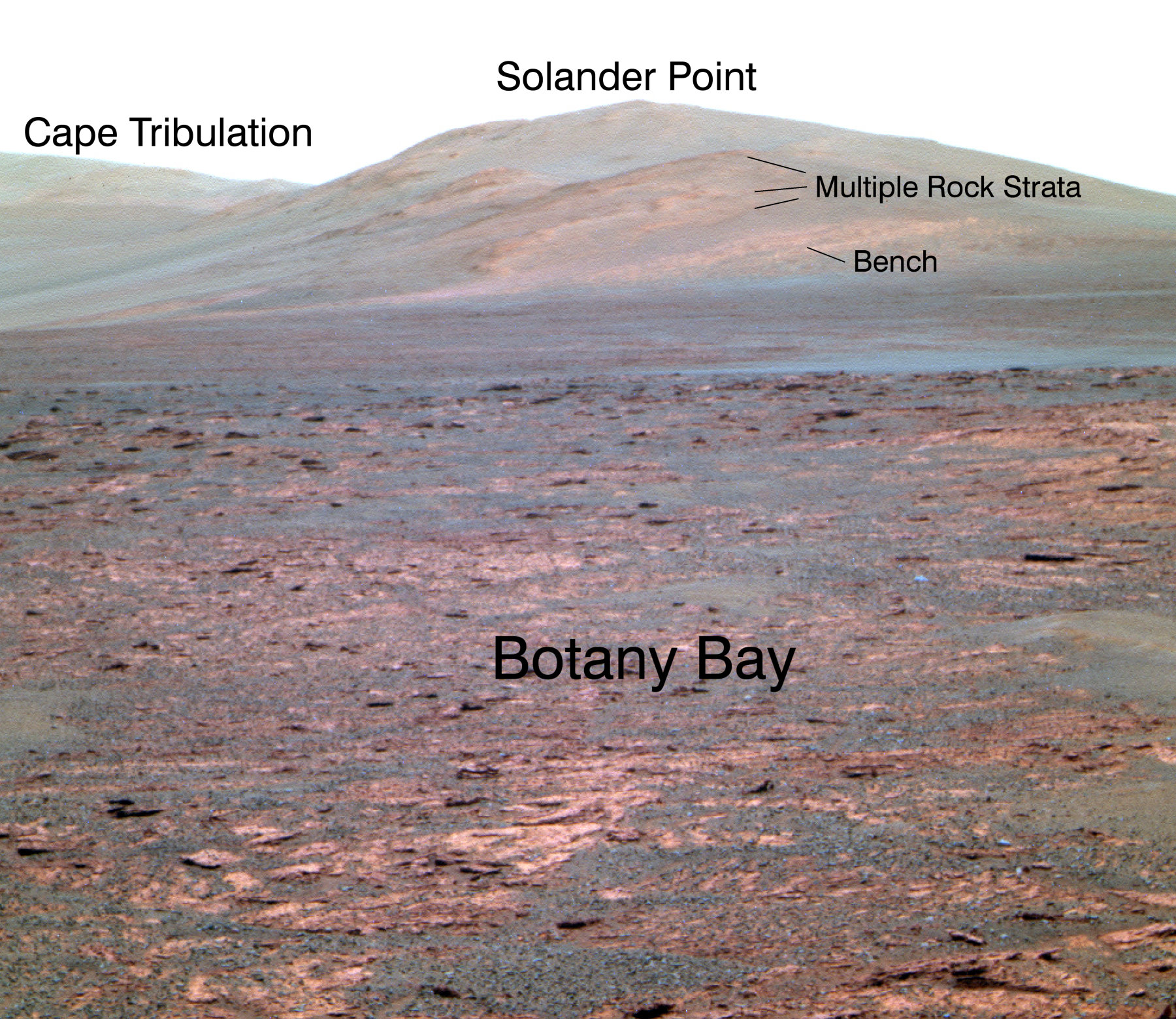
(Bild: NASA, JPL-Caltech, Cornell University, Arizona State University)
Das jetzt angestrebte Ziel ist eine weitere Erhebung am Westrand des Endeavour-Kraters, welche spätestens Anfang August 2013 erreicht werden soll. An der Nordseite dieser etwa 80 Meter hohen Geländeerhebung namens „Solander Point“ soll Opportunity dann den kommenden Marswinter verbringen. Bis zum Frühjahr 2014 stehen dem Rover hier diverse vielversprechende Forschungsziele zur Verfügung. Zudem ergibt sich hier eventuell die Möglichkeit, eine hochaufgelöste Panoramaaufnahme des Endeavour-Kraters anzufertigen.
Mehr als 37 Kilometer
Auf seinem Weg zu „Solander Point“ überschritt Opportunity bereits am 25. Juni im Rahmen einer Fahrt über rund 90 Meter die Marke von 37 auf der Marsoberfläche zurückgelegten Kilometern. Im Gegensatz zu früheren Pressemitteilungen reicht diese auf dem Mars zurückgelegte Distanz von bis dahin 37.028,11 Metern allerdings immer noch nicht aus, um damit den bisherigen Rekordhalter für eine Fahrt auf einem extraterrestrischen Himmelskörper, den sowjetischen Mondrover Lunochod-2, abzulösen. Der ferngesteuerte Rover Lunochod-2, so die bisherigen offiziellen Verlautbarungen, hat im Jahr 1973 eine Distanz von 37,0 Kilometern auf der Oberfläche des Mondes überbrückt. Diese auf unzureichenden Daten basierende Angabe war allerdings offenbar nicht korrekt.
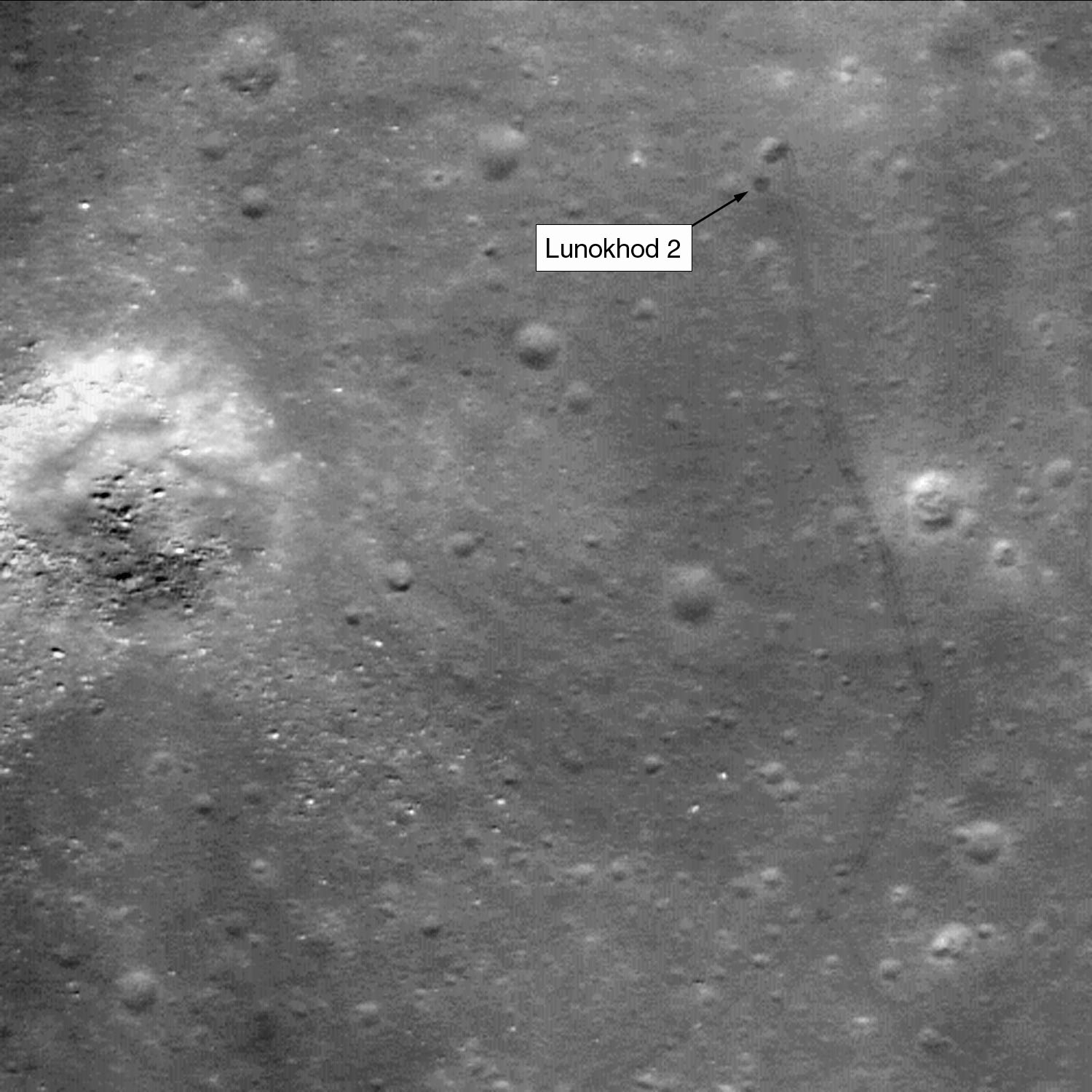
(Bild: NASA)
Während der letzten Jahre durchgeführte Analysen der Aufnahmen der NAC-Kamera an Bord des NASA-Mondorbiters Lunar Reconnaissance Orbiter (LRO) führten vielmehr zu dem Ergebnis, dass Lunochod-2 sogar 42,1 bis 42,2 Kilometer auf dem Mond zurückgelegt hat. Dieser „neue“ Kilometerstand wurde der Fachwelt bereits im Jahr 2012 mehrfach von russischen Wissenschaftlern auf verschiedenen Kongressen präsentiert. Unter anderem wurde der neu ermittelte Kilometerstand Ende September 2012 auf dem damaligen EPSC-Kongress im Rahmen einer Präsentation erwähnt, in der eine Analyse des von dem sowjetischen Rovers passierten Geländes vorgestellt wurde.
Der bisherige Wert der von Lunochod-2 zurückgelegten Strecke basierte ausschließlich auf der Auswertung verschiedener technischen Daten. Für die Ermittlung der zurückgelegten Entfernungen wurde dabei in erster Linie ein zusätzliches neuntes, nicht aktiv angetriebenes Rad verwendet, welches der Mondrover hinter sich herzog und das offenbar einem gewissen Schlupf unterlag. Zum Beispiel bedingt durch Sensorfehler ergaben sich hierbei sehr schnell größere Abweichungen. Es gab keine Möglichkeit, die so gewonnenen Daten in einer ausreichenden Weise mit Bilddaten abzugleichen, da die hierfür zur Verfügung stehenden Aufnahmen aus dem Mondorbit über eine zu geringe Auflösung verfügten. Erst durch die eingehenden Analysen der hochaufgelösten und teilweise dreidimensionalen LRO-Aufnahmen, auf denen die Radspuren des sowjetischen Landers eindeutig zu erkennen sind, konnte jetzt nachträglich die tatsächlich auf dem Mond zurückgelegte Distanz ermittelt werden (Raumfahrer.net berichtete).
Weiter auf Südkurs
Bereits am 26. Juni setze Opportunity seine Fahrt zum „Solander Point“ fort. Allerdings wurde diese Fahrt nach einer zurückgelegten Distanz von lediglich etwa 63 Metern vorzeitig abgebrochen – vorgesehen war eine deutlich längere Fahrstrecke. Der Grund für den Abbruch bestand darin, dass ein Potentiometergeber, welcher an einem der Gelenke des an der Vorderseite des Rovers befindlicher Instrumentenarmes (engl. Bezeichnung „Instrument Depoyment Device“, kurz „IDD“) befestigt ist, während der Fahrt eine angebliche Bewegung des Instrumentenarmes registrierte.
(Bild: NASA, JPL-Caltech)
Weiterführende Analysen der Telemetriedaten des betreffenden IDD-Gelenks und Auswertungen von Bildern zeigten jedoch keine erfolgte Bewegung des IDD, so dass für den folgenden Tag eine weitere Fahrt angesetzt wurde. Allerdings trat hierbei erneut der gleiche Fehler auf. Nach einer ausführlichen Analyse des Problems starteten die für die Steuerung des Rovers verantwortlichen Roverdriver des JPL am gestrigen Tag, dem Sol 3351 der Mission, einen weiteren Versuch. Und diesmal verlief die Fahrt wie erwartet. Opportunity konnte dabei erfolgreich weitere rund 120 Meter in die südliche Richtung überbrücken.
Die Nordflanke des „SolanderPoint“ ist mittlerweile lediglich noch etwas über 800 Meter vom aktuellen Standort des Rovers entfernt. Sollten keine weiteren Probleme auftreten, so wird der Rover voraussichtlich in etwa zwei bis drei Wochen – aus der nordwestlichen Richtung kommend – mit der „Besteigung“ dieses Berghanges beginnen und dort sein vorläufiges Winterquartier einnehmen. Neben dem technischen Zustand, und dieser kann trotzt des hohen Einsatzalters und zeitweilig auftretender Probleme mit einzelnen Komponenten der Hardware immer noch als gut bezeichnet werden, muss bei der Durchführung der Mission jedoch immer auch ein Auge auf die aktuelle Energiesituation des ausschließlich mittels Sonnenergie betriebenen Rovers geworfen werden.
Energiestatus
Glücklicherweise haben die zuletzt im Mai 2013 auf dem Mars beobachteten Staubstürme mittlerweile deutlich an Kraft und Kontinuität verloren. Während der letzten Wochen wurden nur noch wenige und zudem lokal begrenzte Sturmgebiete registriert, welche sich über der nördlichen Tiefebene des Mars bewegten. Der Himmel über dem Meridiani Planum, dem Operationsgebiet von Opportunity, war dagegen weitgehend staubfrei.
Hier ein Überblick über die Entwicklung der Energiewerte von Opportunity während der letzten Wochen. Der Tau-Wert steht dabei für die Durchsetzung der Marsatmosphäre mit Staub und Wassereiskristallen. Je mehr Staub sich in der Atmosphäre des Planeten befindet, desto höher fällt dieser Wert aus. Der Wert für die Lichtdurchlässigkeit der Solarzellen gibt dagegen an, wie viel Sonnenlicht die Solarpaneele des Rovers trotz einer bedeckenden Staubschicht erreicht und letztendlich zur Energiegewinnung genutzt werden kann. Je niedriger der Tau-Wert und je höher der Faktor für die Lichtdurchlässigkeit ausfällt, desto besser ist dies für den Energiehaushalt des ausschließlich mittels Sonnenenergie betriebenen Rovers.
- 26.06.2013: 0,457 kWh/Tag , Tau-Wert 0,805 , Lichtdurchlässigkeit 60,07 Prozent
- 20.06.2013: 0,497 kWh/Tag , Tau-Wert 0,801 , Lichtdurchlässigkeit 62,60 Prozent
- 12.06.2013: 0,517 kWh/Tag , Tau-Wert 0,829 , Lichtdurchlässigkeit 64,50 Prozent
- 05.06.2013: 0,535 kWh/Tag , Tau-Wert 0,806 , Lichtdurchlässigkeit 66,30 Prozent
- 29.05.2013: 0,546 kWh/Tag , Tau-Wert 0,838 , Lichtdurchlässigkeit 66,40 Prozent
- 22.05.2013: 0,541 kWh/Tag , Tau-Wert 0,903 , Lichtdurchlässigkeit 64,90 Prozent
- 15.05.2013: 0,431 kWh/Tag , Tau-Wert 1,210 , Lichtdurchlässigkeit 57,60 Prozent
Bis zum heutigen Tag, dem Sol 3352 seiner Mission, hat der Rover Opportunity insgesamt rund 37.210 Meter auf der Oberfläche des Mars zurückgelegt und dabei fast 181.000 Bilder von der Oberfläche und der Atmosphäre des „Roten Planeten“ aufgenommen und an sein Kontrollzentrum am Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien übermittelt.
Für den heutigen Tag sind kurze Messungen mit dem APX-Spektrometer sowie Anfertigungen von Bildaufnahmen der Marsoberfläche durch die Mikroskopkamera vorgesehen. Opportunitys nächste Fahrt ist für den morgigen Sonntag, den Missionstag 3353, geplant und soll erneut in die südliche Richtung führen.
Diskutieren Sie mit im Raumcon-Forum: