Neues Raumfahrtprojekt TRIPLE-MoDo – Bremer Konsortium entwickelt innovatives Dockingsystem für Unterwasserroboter. Gemeinsame Pressemitteilung der Projektpartner.
(Bild: DFKI)
Bremen – Wie können unzugängliche Orte auf der Erde – zum Beispiel die Tiefsee – aber auch auf anderen Planeten erforscht werden? Extreme Ziele stellen auch extreme Anforderungen an die eingesetzte Technik. Dabei geht es nicht nur um Korrosion oder Druckbeständigkeit: Neue technische Lösungen sollen zum Beispiel die Kommunikation mit und die Energieversorgung von abgetauchten Robotern ermöglichen – und zwar mithilfe eines innovativen Andocksystems. Dafür hat ein Konsortium aus drei Bremer Partnern das Forschungs- und Entwicklungsprojekt TRIPLE-MoDo gestartet.
(Bild: MARUM – Zentrum für Marine Umweltwissenschaften, Universität Bremen)
Sowohl für die Erforschung der Weltmeere als auch für die Erkundung extraterrestrischer Ozeane werden robotische Systeme benötigt, die eigenständig und über längere Zeiträume unter Wasser operieren können. Dafür arbeitet ein Bremer Konsortium im jetzt gestarteten Projekt TRIPLE-MoDo („Technologies for Rapid Ice Penetration and Subglacial Lake Exploration – Mobile Docking“) an einem innovativen Dockingsystem. Zu den Projektpartnern gehören die DSI Aerospace Technology GmbH, das Robotics Innovation Center des Deutschen Forschungszentrums für Künstliche Intelligenz und das MARUM – Zentrum für Marine Umweltwissenschaften der Universität Bremen. Finanziert wird das Projekt vom Raumfahrtmanagement des Deutschen Zentrums für Luft- und Raumfahrt in Bonn.
Das geplante System soll es einem autonomen Unterwasserfahrzeug (AUV) ermöglichen, an einer Unterwasserstation anzudocken, um gesammelte Daten zu übermitteln, seine Batterie aufzuladen und somit längere Zeit unter Wasser zu bleiben. Um den hohen Anforderungen an das Andocken in tiefen Gewässern gerecht zu werden, setzen die Partner auf Komponenten aus dem Bereich Soft Robotics. Diese zeichnen sich durch eine enorme Flexibilität und die Fähigkeit aus, Kollisionen sanft abfangen zu können.
(Bild: MARUM – Zentrum für Marine Umweltwissenschaften, Universität Bremen)
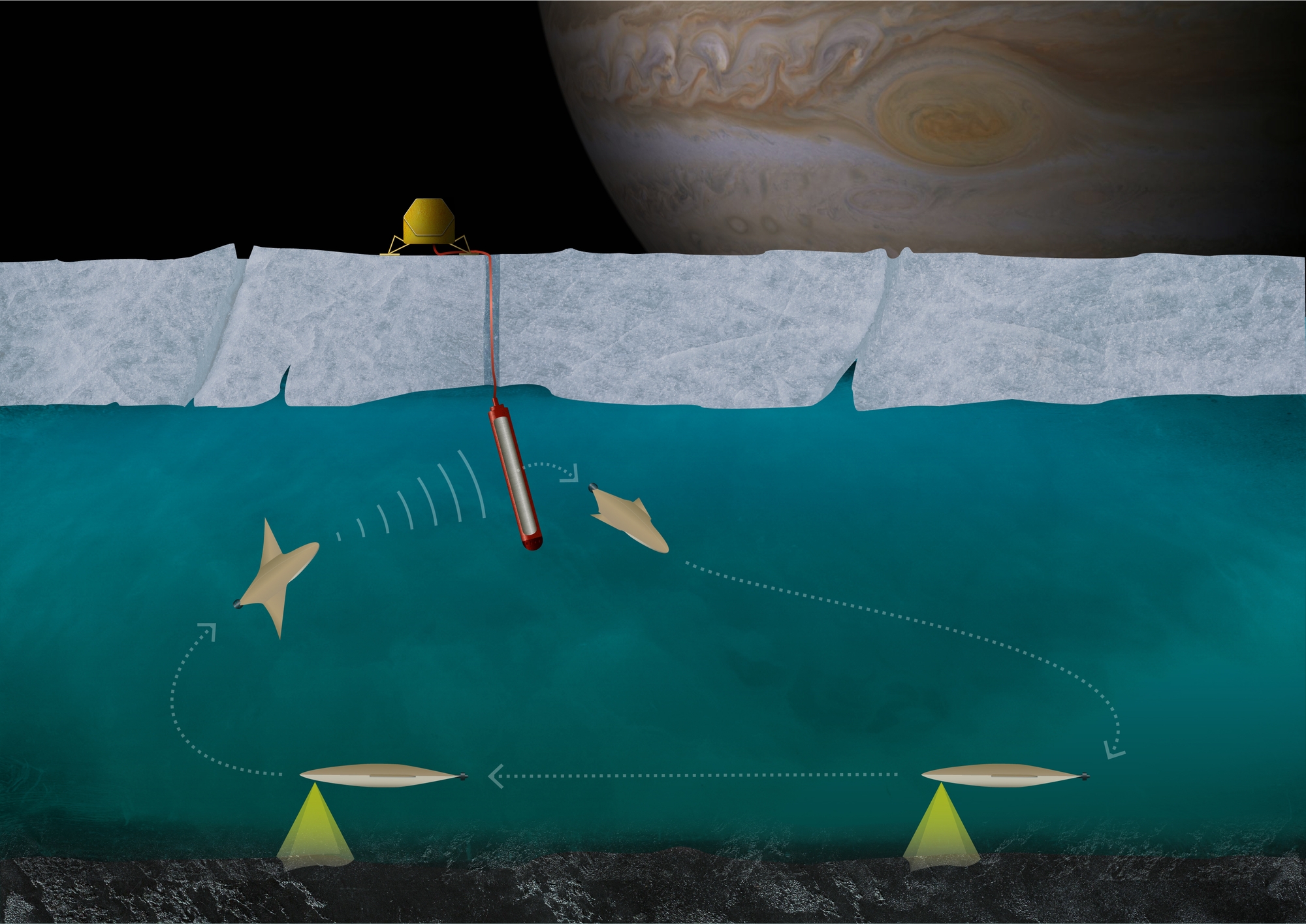
Das Projekt TRIPLE-MoDo ist eins von mehreren Vorhaben innerhalb der übergeordneten TRIPLE-Projektlinie des DLR Raumfahrmanagements. Ziel der Projektlinie ist es, ein intelligentes Explorationssystem zu entwickeln, das sich zur Durchführung wissenschaftlicher Beobachtungen in Gewässern unter Eis eignet. Das projektierte System besteht aus einem vollautonomen Kleinst-Tauchroboter (einem sogenannten nanoAUV) einer teilautonomen Einschmelzsonde, die sich in die Eisschicht einschmilzt und das AUV hindurchtransportiert, sowie einem astrobiologischen Labor (AstroBioLab) zur Untersuchung von Flüssigkeits- und Sedimentproben. Die Schmelzsonde dient dem Roboter zudem als feste Unterwasserstation zum Daten- und Energieaustausch.
Das innovative System soll sowohl für planetarische Missionen als auch für Raumfahrtanwendungen im erdnahen Bereich von großem Nutzen sein. Das Interesse seitens der Raumfahrt besteht darin, künftig ein derartiges auf der Erde eingesetztes und erprobtes System auch für die Erforschung von Ozeanen auf anderen Planeten und Monden, wie zum Beispiel jenem auf dem Jupitermond Europa, zu nutzen. Unter der Eisdecke des Jupitermondes werden in rund 100 Kilometern Wassertiefe Hydrothermalquellen vermutet, die durch einen Wärmestrom und das Einbringen von Mineralien selbst an dunklen und kalten Orten Leben ermöglichen.

(Bild: Zentrum für Marine Umweltwissenschaften, Universität Bremen; Christian Engler)
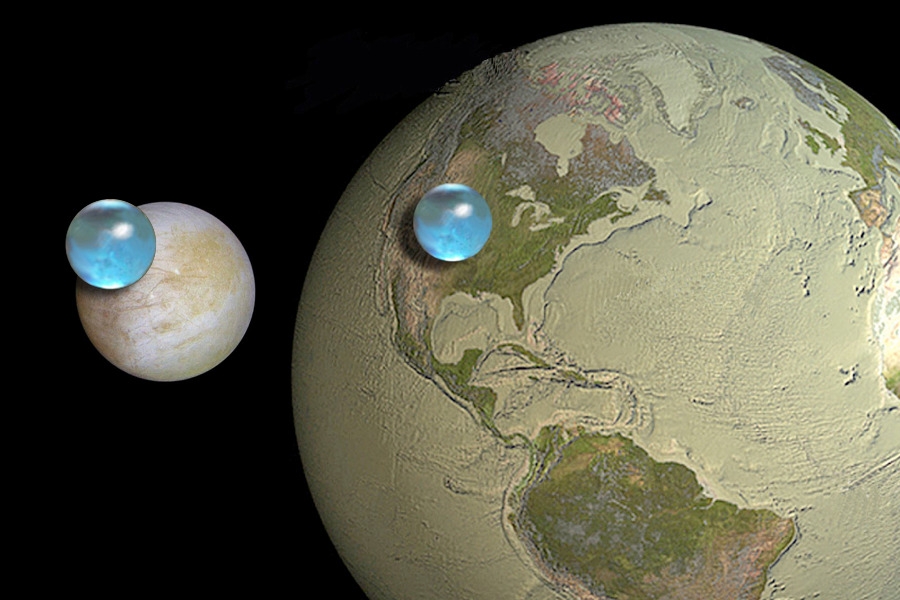
„Der vermutete Ozean auf Europa besitzt eine Wassermenge, die ungefähr dem Doppelten unseres Planeten Erde entspricht“, erklärt Projektleiter Dr. Christoph Waldmann vom MARUM. „Am Ende geht es um die Frage, ob sich in den extraterrestrischen Ozeanen Spuren von vergangenen oder gegenwärtigen Lebensformen finden lassen.“
Das entwickelte Gesamtsystem soll bis 2027 fertiggestellt und im Rahmen einer Demonstrationsmission in der Antarktis in enger Zusammenarbeit mit Meeres- und Weltraumwissenschaftlerinnen und -wissenschaftlern getestet werden.
Mehr Informationen zum Projekt und den beteiligten Partnern:
TRIPLE-nanoAUV: https://triple-project.net
DSI Aerospace Technologie GmbH: www.dsi.space
MARUM – Zentrum für Marine Umweltwissenschaften der Universität Bremen: www.marum.de
Deutsches Forschungszentrum für Künstliche Intelligenz (DFKI), Robotics Innovation Center: https://robotik.dfki-bremen.de/de/startseite
Diskutieren Sie mit im Raumcon-Forum: