Der Europäische Roboterarm ERA hat für den russischen Teil der ISS eine gleich große Bedeutung wie der SSRMS/Canadarm 2 für den US-Teil.
Autor: Daniel Maurat
Der Europäische Roboterarm ERA (European Robotic Arm) soll am MLM Naúka, dem bisher letzten Modul der Internationalen Raumstation ISS betrieben werden. Es soll für den russischen Teil die gleiche Funktion haben wie der SSRMS/Canadarm 2 für den US-basierten.
Entwicklung und Bau
Maße
Länge: 11,3 Meter
Breite: 0,3 Meter
Masse: 630 kg
Maximal zu bewegende Masse: 8 t
Start: März 2012 (geplant)
Die Entwicklung begann, als klar wurde, dass der SSRMS/Canadarm 2 nicht auch am russischen Teil der ISS operieren könnte. Das liegt daran, dass es dort keine passende Adapter (PDGFs) für diesen gab. Also entschied man sich, einen Roboterarm für den russischen Teil zu bauen. Diese Aufgabe übernahm die ESA und machte einen Vertrag für den Bau mit Dutch Space, eine niederländische Tochter des Unternehmens EADS Astrium. Hergestellt wurde ERA in Leiden in den Produktionshallen von Dutch Space. Im Sommer 2006 schließlich wurde der Roboterarm nach Russland gebracht und dort mit dem MLM Naúka verbunden. Nun warten beide Teile auf den Start.
Aufbau
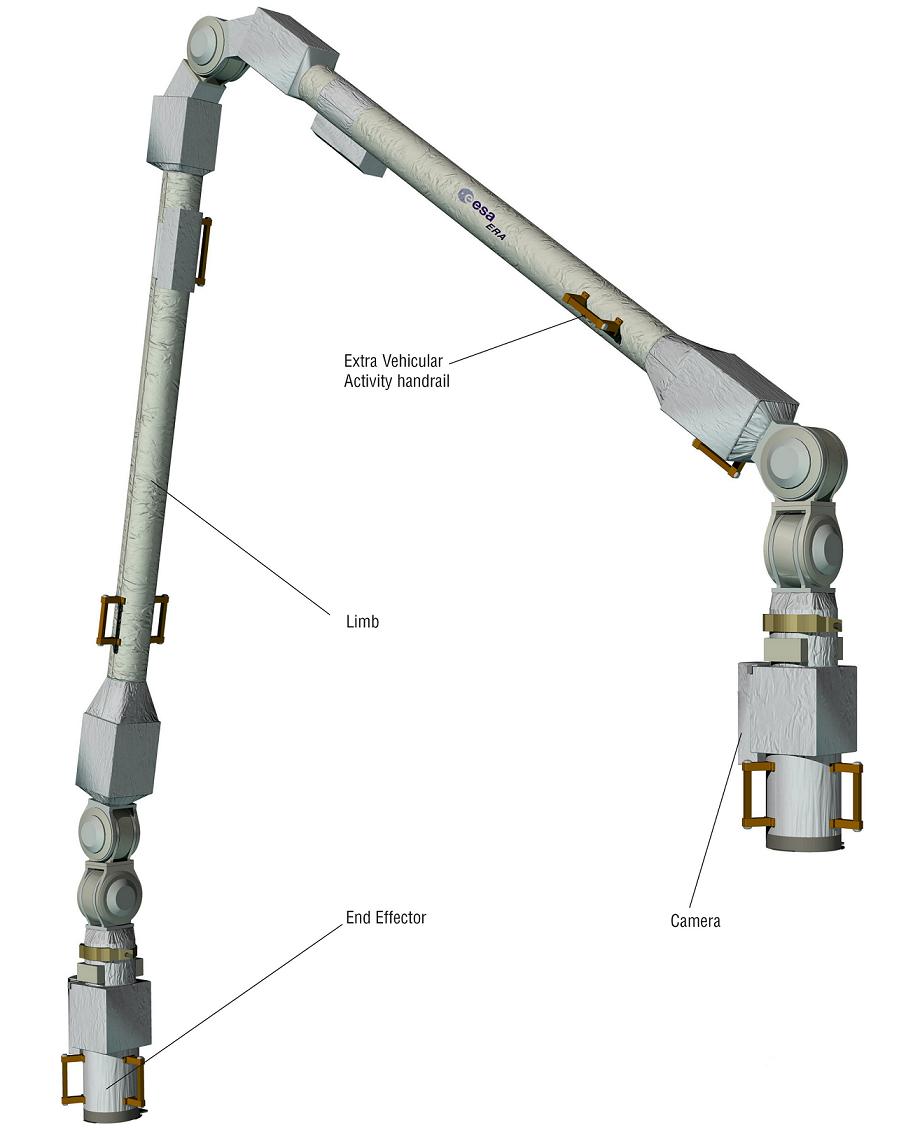
ERA ist, im Gegensatz zu SSRMS/Canadarm 2, ein relativ kleiner Roboterarm. Er besteht aus zwei fünf Meter langen Hauptsegmenten, den Arm-Sektionen. Diese bestehen aus kohlefaserverstärktem Kunststoff, der sie sehr leicht und gleichzeitig stabil macht. Zwischen den beiden Arm-Sektionen befindet sich ein Ellenbogengelenk.An den Enden beider Armsektionen befinden sich zwei Greifer (End Effectors), die auch Daten, Strom und mechanischen Antrieb auf ihre Nutzlast übertragen können. Auf ihnen befinden sich insgesamt vier Kameras mit Beleuchtungseinheiten. Sie werden CLU (Camera and Light Units, Kamera- und Lichteinheiten) genannt. Zwischen Armsektion und Greifer befindet sich ein „Handgelenk“ aus drei Gelenken. Die machen ERA sehr beweglich. Im Arm selber befindet sich darüber hinaus noch ein Bordcomputer, der ECC (ERA Control Computer, ERA Bordcomputer). Er kann den Arm auch autonom, also ohne Steuerung durch den Menschen, betrieben werden.
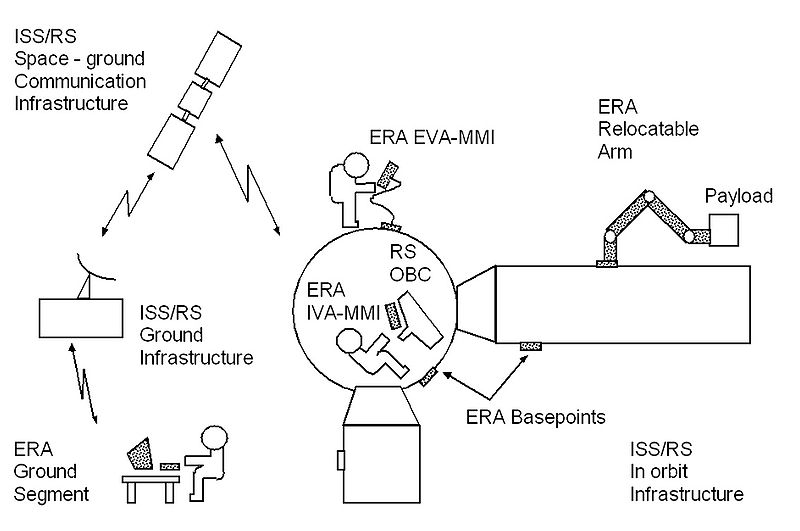
Für die Steuerung von ERA gibt es drei Systeme: Das erste ist das IVA-MMI (Intra Vehicular Activity-Man Machine Interface, Innenbordaktivität-Mensch-Maschine-Bedienelement). Dieses besteht aus einem Laptop im MLM Naúka, von dem aus der Roboterarm gesteuert werden kann. Die zweite Variante ist das EVA-MMI (Extra Vehicular Activity-Man Machine Interface, Außenbordeinsatz-Mensch-Maschine-Bedienelement). Es besteht aus einem speziellen Steuerelement, das auch von einem Raumfahrer in klobrigen Handschuhen benutzt werden kann. Die dritte Variante ist die Steuerung von ERA vom Boden aus. Dabei steuert die Bodenstation den Arm.
Im Orbit
(Bild: ESA)
Der Start von ERA wird zusammen mit dem MLM Naúka (Stand Dezember 2010) im März 2012 mit einer Proton-M-Trägerrakete vom Kosmodrom Baikonur aus stattfinden. Sobald das MLM sein Ankopplungsmanöver an die ISS vollführt hat, beginnt die Arbeit für ERA: Zu seinen Aufgabenfeldern wird z.B. das Aussetzen und Wiedereinbringen von Experimenten, vor allem aus Naúka, in den freien Weltraum gehören. Darüber hinaus soll mit seiner Hilfe die Station mittels Video inspiziert werden. Eine weitere Hauptaufgabe wird die Unterstützung während Außenbordeinsätzen und die Handhabung externer Nutzlasten sein, eine nicht minder wichtige die Installation und Aufstellung sowie der Ersatz und die Reparatur von Solarpaneelen.
Verwandte Artikel: