Der Marsrover Curiosity befindet sich auf dem Weg zu dem im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons. Auf dem Weg zu seinem neuen Ziel wird der Rover zukünftig pro Fahrt auch längere Strecken als bisher üblich zurücklegen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS.
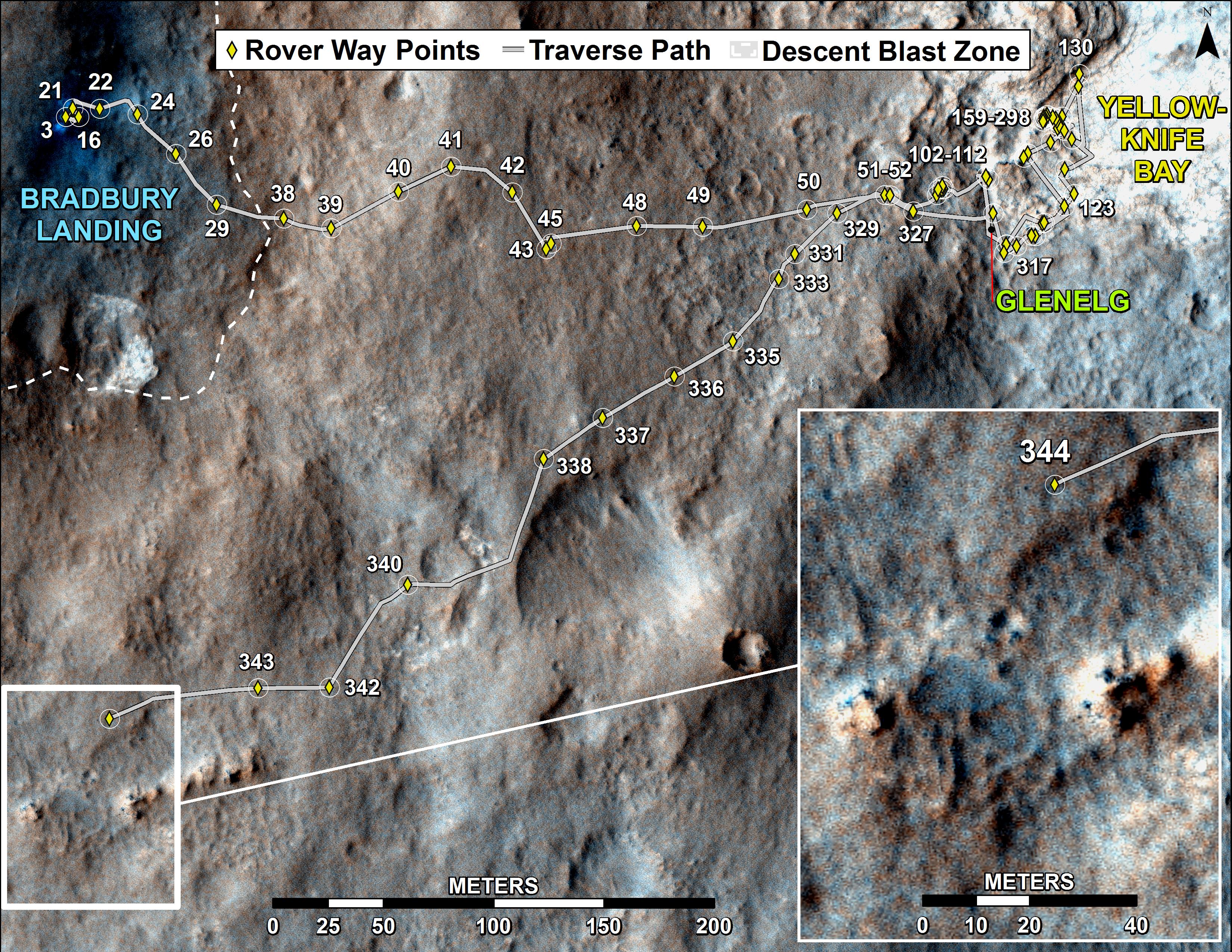
(Bild: NASA, JPL-Caltech, University of Arizona)
Der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Curiosity befindet sich gegenwärtig auf einer voraussichtlich noch mindestens 12 Monate dauernden Fahrt zu einem etwa acht Kilometer entfernt gelegenen Punkt an der Basis des im Inneren des Gale-Kraters befindlichen Zentralberges Aeolis Mons (Raumfahrer.net berichtete). Auf dem Weg zu diesem neuen Forschungsziel hat sich während der letzten Woche die Länge der dabei absolvierten Tagesetappen deutlich erhöht.
Während der ersten Monate seiner Erkundungsmission auf dem Mars überbrückte Curiosity in der Regel pro Fahrt lediglich kürzere Distanzen, welche typischerweise zwischen wenigen Metern bis hin zu etwa 35 Metern lagen. Den bisherigen Tagesrekord, eine Fahrt über 48,95 Meter, stellte der Rover dabei bereits am 28. September 2012, dem “Sol” 50 seiner Mission, auf. Am vergangenen Sonntag, dem Sol 340, konnte Curiosity jedoch mit einer Fahrt über 100,3 Meter diesen alten Rekord deutlich überbieten.
Diese weite Fahrt wurde in erster Linie möglich, weil der Rover am Ende der vorherigen Fahrt einen im Bezug auf das zukünftig zu überbrückende Gelände eine leicht erhöhte Position eingenommen hatte. Dieser Standort ermöglichte es, besonders gute und dabei auch weitreichende Aufnahmen des vorausliegenden Geländes anzufertigen. Als Grundlage für die Planung der Fahrt am vergangenen Sonntag dienten Stereobilder der Navigationskameras, welche das Gelände in 3D zeigten, sowie Tele-Aufnahmen der MastCam. Solche Aufnahmen sind notwendig, damit die für die Planung der Fahrten zuständigen “Roverdriver” des Jet Propulsion Laboratory (JPL) der NASA im Vorfeld einer zu absolvierenden Fahrt einen Kurs festlegen können, auf dem potentiell gefährliche Geländehindernisse wie größere Gesteinsbrocken, Neigungen oder Sanddünen sicher umfahren werden können.
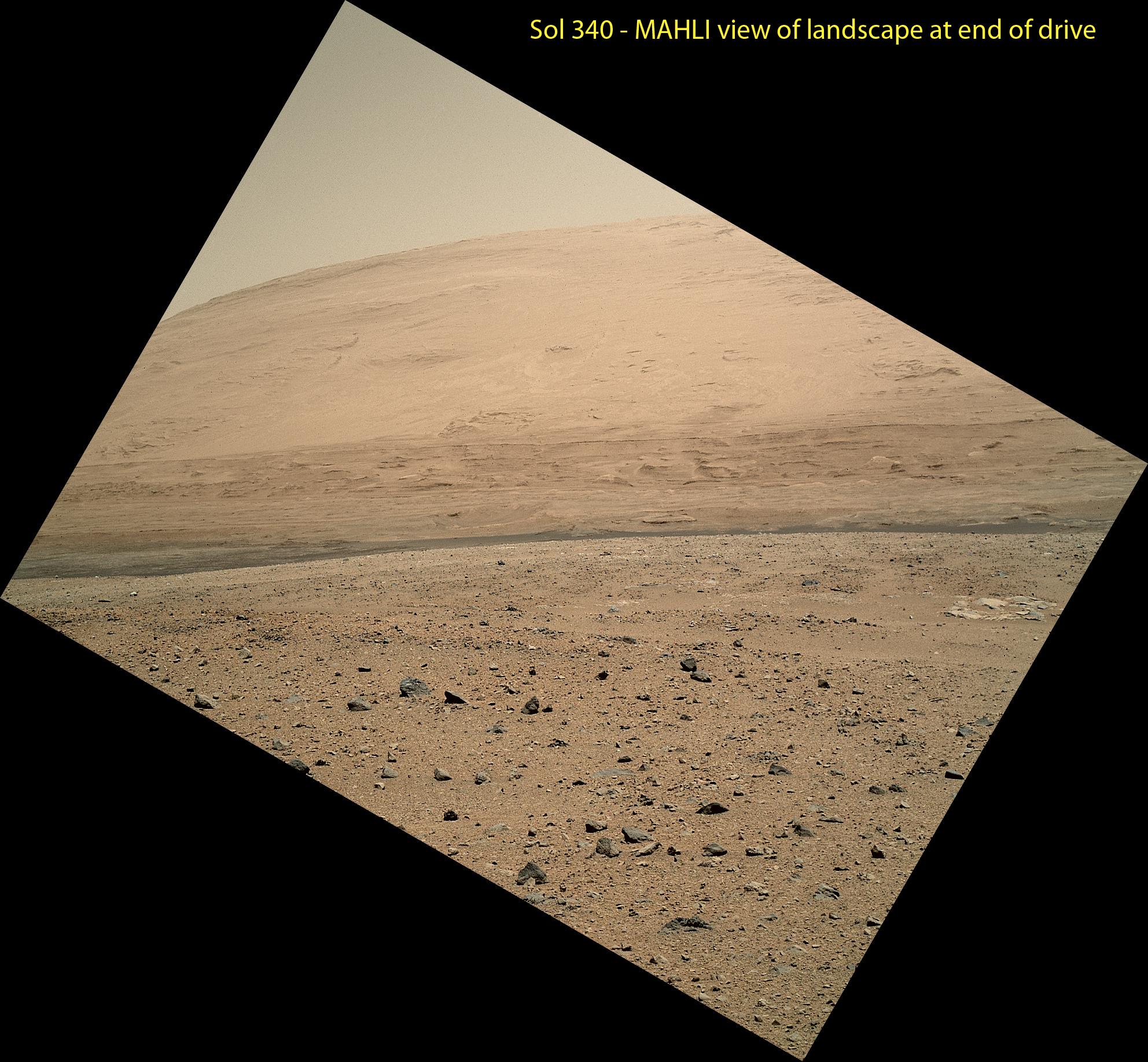
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
“Diese weite Fahrt wurde dadurch ermöglicht, weil wir uns am Startpunkt der Fahrt an einer erhöhten Stelle befanden und mittels der Aufnahmen der MastCam die Größe der Steine abschätzen konnten. Somit waren wir uns sicher, dass es auf dem festgelegten Kurs keine Gefahren gibt”, so Paolo Bellutta, einer der Roverdriver des JPL. “Wir konnten relativ weit nach vorne schauen. Allerdings gab es direkt voraus einen Geländeabschnitt, den wir nicht genau erkennen konnten. Diesen Bereich haben wir umfahren.”
Visuelle Odometrie
Zusätzlich wurde im Rahmen der Fahrt vom Sol 340 eine als visuelle Odometrie bezeichnete Methode eingesetzt. Hierbei handelt es sich um eine Vorgehensweise, bei der der Rover während einer Fahrt in bestimmten Abständen stoppt und mit seinen Gefahrenerkennungs- und Navigationskameras Aufnahmen der Umgebung anfertigt. Jeweils zwei Kameras bilden dabei zeitgleich den gleichen Geländeabschnitt ab. Diese Aufnahmen werden von der “Drive-Software” des Rovers zu Stereoaufnahmen kombiniert und anschließend autonom ausgewertet, wobei die aktuellen Positions- und Neigungsveränderungen des Rovers millimetergenau ermittelt werden. Hierzu sucht sich das Software-Programm markante Punkte wie zum Beispiel kleine Steine auf der Planetenoberfläche und berechnet die Positionsveränderungen vor und nach jedem Fahrtschritt.
Auf diese Weise kann die Software ermitteln, ob sich der Rover noch auf dem vorgesehenen Kurs befindet oder ob die Räder während der Fahrt eventuell aufgrund eines lockeren Untergrundmaterials “durchgedreht” sind. Ein solcher Schlupf der Räder würde die mittels der erfolgten Radumdrehungen berechte Länge der zurückgelegten Entfernung verfälschen. Eingesetzt wurde die visuelle Odometrie auf dem ersten Teilstück der Etappe, bei dem Curiosity den nicht deutlich genug einsehbaren Geländebereich umfuhr.
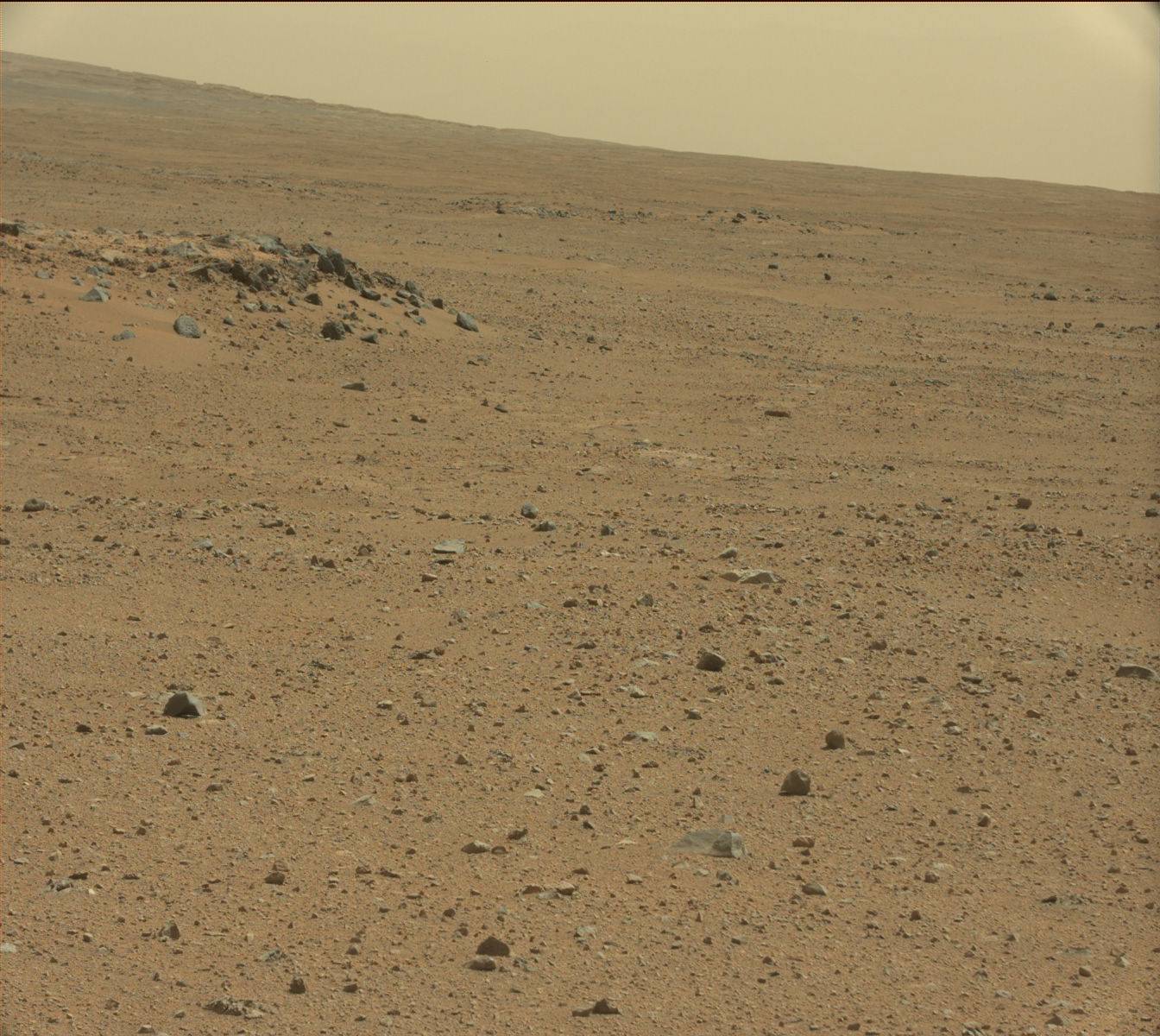
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Der Einsatz der visuellen Odometrie am vergangenen Sonntag wurde erst durch ein kürzlich übermitteltes Update für die Drive-Software des Rovers möglich. Bedingt durch den Ende Februar 2013 erfolgten Wechsel auf das B-Side-System des Hauptcomputers (Raumfahrer.net berichtete) wurde seitdem auch ein redundantes Paar der vorderen und hinteren Gefahrenerkennungskameras und der Navigationskameras eingesetzt. Bei den damit verbundenen Tests zeigte sich jedoch im Frühjahr, dass die neu verwendeten Navigationskameras anscheinend empfindlicher auf die Umgebungstemperaturen reagieren als vorgesehen. Ohne das Software-Update hätte es dazu kommen können, dass die Software des Rovers bei der Auswertung der Stereobilder und der Berechnung der aktuellen Positionen – abhängig von den Umgebungstemperaturen, bei denen die Aufnahmen angefertigt wurden – zu teilweise falschen Ergebnissen gelangt.
“Bisher nutzen wir die visuelle Odometrie in erster Linie dazu, um ein Rutschen des Rovers zu erkennen”, so Jennifer Trosper, die stellvertretende Projektmanagerin der Curiosity-Mission am JPL. Allerdings wird derzeit auch überprüft, inwieweit die visuelle Odometrie auch bei unterschiedlichen Temperaturen für eine sichere autonome Navigation des Rovers eingesetzt werden kann.
Autonome Navigation
Aufgrund der großen Distanz zwischen Erde und Mars – abhängig von der Konstellation der beiden Planeten kann die Signallaufzeit bis zu 22 Minuten betragen – kann Curiosity von den Roverdrivern nicht etwa mittels eines Joysticks in Echtzeit navigiert werden. Vielmehr müssen sämtliche von dem Rover zu absolvierenden Manöver im Voraus festgelegt werden. Nach der Übertragung der entsprechenden Kommandosequenzen führt der Rover diese Manöver dann selbstständig durch. Durch diese Vorgehensweise ist die Länge der im Rahmen einer Fahrt zurückzulegenden Strecke normalerweise auf eine Distanz von etwa 100 Metern begrenzt. Dies entspricht der Entfernung, in der die Kamerasysteme des Rovers die Umgebung in einer für die Planung einer zukünftigen Fahrt ausreichend hohen Auflösung wiedergeben können.
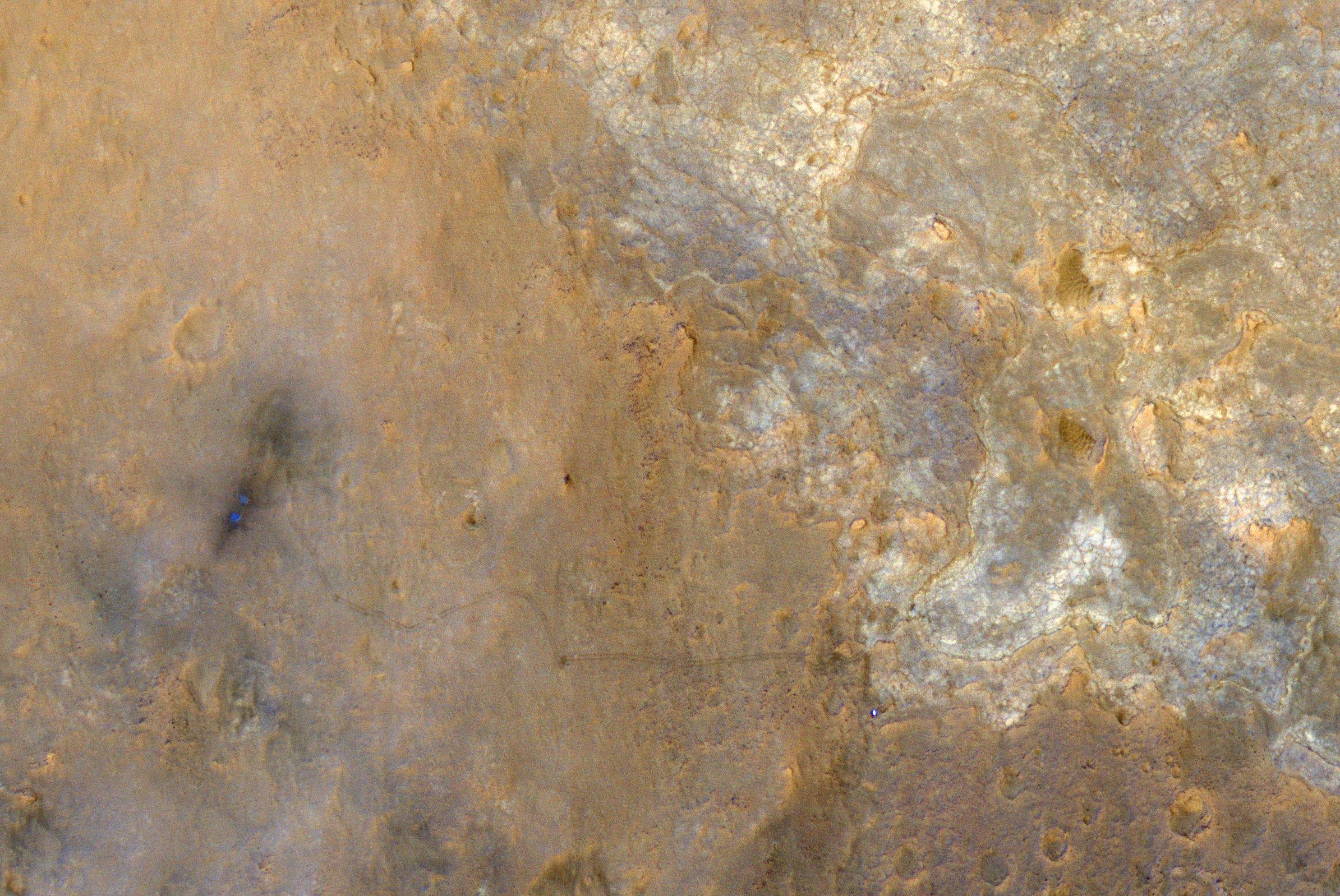
(Bild: NASA, JPL-Caltech, University of Arizona)
Allerdings besteht prinzipiell die Möglichkeit, dass Curiosity seine Fahrt nach dem Absolvieren dieser vorkommandierten Route auch selbstständig und ohne ein direktes Eingreifen der Roverdriver fortsetzt. Der Rover müsste hierfür in regelmäßigen Abständen Aufnahmen seiner Umgebung anfertigen, diese selbstständig bewerten und sich dabei einen möglichst sicheren Kurs auf ein vorgegebenes Zielgebiet suchen. Mit der gleichen Vorgehensweise konnten die beiden Vorgänger von Curiosity, die Marsrover Spirit und der immer noch aktive Opportunity, in den vergangenen Jahren Tagesetappen von deutlich über 100 Metern absolvieren. Opportunitys “persönlicher Rekord”, aufgestellt Ende März 2005, liegt bei 220 an einem einzigen Tag zurückgelegten Metern auf der Marsoberfläche. Für eine solche autonome Navigation ist jedoch der Einsatz der visuelle Odometrie zwingend notwendig.
Es wird jedoch noch einige Zeit vergehen, bevor Curiosity die Möglichkeit der autonomen Fahrweise einsetzt. Auch Tagesetappen von 100 Metern werden zunächst aller Wahrscheinlichkeit nach nicht zur Regel werden. Vielmehr, so Ken Herkenhoff vom USGS, sollen zunächst noch weitere Tests der Software durchgeführt werden, bevor die sich bietenden Möglichkeiten voll eingesetzt werden. In den letzten Tagen überbrückte der Marsrover zwischen dem 23. und dem 26. Juli bei vier weiteren Fahrten insgesamt weitere rund 240 Meter. Zu Beginn der Mission waren 10 Fahrten notwendig, um eine solche Strecke zurückzulegen. Curiositys nächste Fahrt ist für den morgigen Sonntag, den Sol 347, vorgesehen.
Bis zum heutigen Tag, dem Sol 346 seiner Mission, hat der Marsrover Curiosity eine Distanz von fast 1.490 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. Seit dem Erreichen des Mars haben die Kamerasysteme von Curiosity 70.167 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum: