Während des Aufenthaltes von Peggy Whitson und Juri Malentschenko wurden drei neue Module in Betrieb genommen. Auch der Erstflug einer Raumfahrerin aus Südkorea ging erfolgreich zu Ende. Allerdings gab es bei der Rückkehr ein ernstes Problem, dessen Ursache gegenwärtig untersucht wird.
Ein Beitrag von Günther Glatzel. Quelle: NASA, Energia, ESA.
Die an Höhepunkten reiche ISS-Expedition 16 wurde erfolgreich beendet. Daran waren insgesamt 6 Raumfahrer hauptamtlich beteiligt. Den Stamm bildeten Kommandantin Peggy Whitson und Bordingenieur Juri Malentschenko. Mit ihnen arbeiteten als Expeditionsmitglieder Clayton Anderson, Leopold Eyhardts, Daniel Tani und in den letzten Wochen Garrett Reisman. Außerdem waren auch die jeweils sechsköpfigen Besatzungen der Shuttle-Missionen STS 120, STS 122 und STS 123 sowie die Gäste Sheikh Muszaphar Shukor aus Malaysia und die Südkoreanerin So-Yeon Yi mit von der Partie.
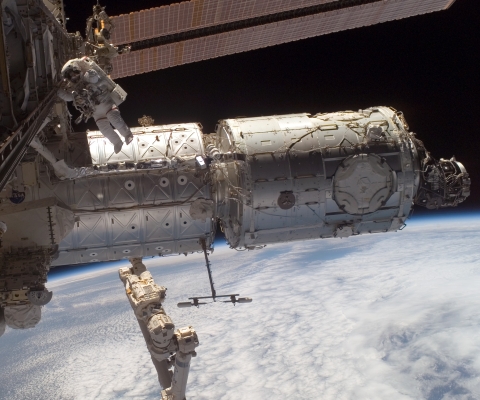
Whitson und Malentschenko starteten mit Sojus-TMA 11 am 10. Oktober 2007 und erreichten die Station zwei Tage später. Nach der formalen Übernahme der „Amtsgeschäfte“ von ihren Vorgängern begannen die Wartungs-, Forschungs-, Umbau- und Erweiterungsarbeiten. Noch im Oktober gelangte das zweite Verbindungsmodul des amerikanisch basierten Teils zur Station. Es trägt den passenden Namen Harmony und wurde in Italien gebaut. Die Besatzung der Raumfähre Discovery koppelte Harmony am 26. Oktober zunächst an Unity-Backbord an. Außerdem wurde der Solarzellenträger P6 am 30. Oktober von Z1 abgekoppelt und mit dem Manipulatorarm der Station an das Backbordende der Gitterstruktur transportiert. Nach der Befestigung an P5 wurden die Solarzellenpaneele erneut ausgefahren. Dabei trat an einer Stelle ein Riss auf. Dieser wurde am 31. Oktober während eines außergewöhnlichen Außenbordeinsatzes von Scott Parazynski mit Hilfe von isolierten Drahtschlingen „genäht“. Dabei stand er mit den Füßen verankert auf einer Plattform am Ende des Orbiter Boom Sensor Systems, das vom Stationsmanipulator Canadarm2 gehalten wurde.

Am 9. Februar 2008 wurde das mit der Raumfähre Atlantis zur Station gebrachte europäische Forschungsmodul Columbus am Steuerbord-Kopplungsaggregat von Harmony angedockt. Es wurde in Deutschland gebaut und ist einer von drei Hauptbeiträgen der ESA zur Internationalen Raumstation. An den nachfolgenden Installationsarbeiten außerhalb der Station war auch der deutsche Raumfahrer Hans Schlegel beteiligt. Mit der Installation und Inbetriebnahme der Inneneinrichtung war in den folgenden Wochen auch die Stammbesatzung beschäftigt, zu der für einige Wochen der Franzose Leopold Eyhardts gehörte.
Etwa einen Monat danach transportierte die Raumfähre Endeavour das japanische Logistikmodul zur Station. Es wurde am 14. März vorläufig an Harmony-Zenit angekoppelt und findet später seinen Platz auf dem japanischen Experimentiermodul, das mit STS 124 Anfang Juni 2008 zur ISS kommen soll. Zum japanischen Komplex Kibo gehören außerdem ein Manipulatorarm und eine Außenplattform, die im nächsten Jahr zur Station gebracht werden soll. Mit der Endeavour wurde aber auch der kanadische Roboter Dextre geliefert. Er kann filigranere Arbeiten ausführen als mit dem Canadarm2 allein möglich sind, wurde im Verlaufe mehrerer Ausstiege montiert und zu seinen Stammplatz auf Destiny transportiert.
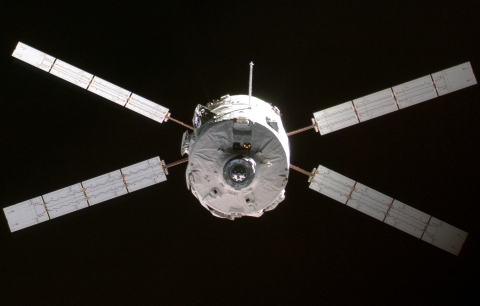
Am 3. April koppelte das europäische Transportraumschiff ATV 1 am Heck der Station an. Jules Verne ist das erste von zunächst 5 geplanten derartigen Transportern, die jeweils etwa 10 Tonne Fracht und Treibstoffe zur ISS bringen können. Neu ist, dass das Raumschiff nicht nur beim unmittelbaren Andockvorgang autonom arbeitet. Außerdem verwendet es zusätzlich zum weltweiten US-Navigationssystem GPS und dem bewährten russischen Radarsystem Kurs ein bei der ESA entwickeltes System, das aufgrund laseroptischer Daten Angaben zu Position und Geschwindigkeit berechnet. Vor dem eigentlichen Rendezvous wurden zwei Demonstrationen absolviert, bei denen sich ATV der Station zunächst auf 3,5 km und später bis auf 11 Meter näherte. Dabei wurden Halte- und Fluchtoperationen getestet. Weiteren Nachschub an Versorgungsmaterialien und Ausrüstungen brachten die automatischen Frachter Progress-M 62 und 63.
Während der Mission wurden aber auch 79, zum Teil komplexe wissenschaftliche Experimente durchgeführt. Diese betrafen die Gebiete Medizin, Biologie, Biotechnologie, Materialwissenschaft, Erderkundung und Raumfahrttechnologie. Automatisch ablaufende Untersuchungen bedürfen der Wartung durch die Raumfahrer. Dabei müssen Messergebnisse gesichert, die Geräte überprüft und Proben gewechselt werden. Medizinische und biologische Experimente haben dagegen auch den Menschen als Untersuchungsgegenstand.

(Bild: NASA)
Hier sollen nur einige Beispiele der internationalen Untersuchungen aufgeführt werden. Coarsening in Solid Liquid Mixtures-2 (CSLM-2) erforscht den Einfluss kleiner und größerer Partikel in Stoffgemischen auf die Festigkeit und Elastizität des Materials. Bei Lab-on-a-Chip Application Development-Portable Test System (LOCAD-PTS) geht es um ein Handgerät für den schnellen Nachweis potentiell gefährlicher biologischer und chemischer Substanzen, die sich an den Oberflächen der Apparaturen in der Station sammeln. Innerhalb von 15 Minuten liegen Analyseergebnisse vor und werden auf einem Display des Gerätes angezeigt – ähnlich wie bei einem Tricorder aus der Fernsehserie Star Trek. ELaboratore Immagini Televisive – Space 2 (ELITE-S2) untersucht Änderungen der Koordination zwischen Gehirn, Sehen und Bewegungen in der Schwerelosigkeit. Dazu werden bestimmte Bewegungsvorgänge dreidimensional erfasst. Im Rahmen von Bioemulsija werden Teile eines autonomen Bioreaktors zur Erhaltung von Mikroorganismen und biologisch aktiver Substanzen getestet. Bei Vakzina-K werden im Kristallisator Lutsch 2 Proteine, die potentiell gegen die Immunshwächekrankheit AIDS eingesetzt werden könnten, synthetisiert und analysiert. Um die Entwicklung dreidimensionaler photonischer Kristalle durch die Selbstorganisation von Nanopartikel-Kolloiden in Elektrolytlösungen mit anschließender Fixierung in elastischen Gelformen geht es beim Experiment Jaxa 3DPC.
Nach der Übergabe der Station an die neue Stammbesatzung und den die Landung vorbereitenden Arbeiten koppelte Sojus-TMA 11 heute um 7:06 Uhr MESZ von der ISS ab und landete gegen 10:30 Uhr MESZ nach einer vergleichsweise harten, ballistischen Wiedereintrittsphase rund 420 Kilometer vom geplanten Landeort entfernt in der kasachischen Steppe.
Vorgesehen war ursprünglich eine aerodynamische Wiedereintrittsphase. Dabei wird die Landkapsel in den dichteren Schichten der Erdatmosphäre in eine Lage gebracht, die durch einen geringfügigen aerodynamischen Auftrieb den Bremsweg verlängert und damit die Bremskräfte reduziert. Nach dem Öffnen des Fallschirms verläuft die eigentliche Landung identisch zum ballistischen Verfahren. Es handelt sich in keinem Falle um eine Notlandung.
Edit (25. April): Einige Aussagen Verantwortlicher lassen vermuten, dass sich der Serviceteil nach dem Bremsmanöver nicht wie vorgesehen von der Landekapsel löste. Demnach könnte das Gespann mit dem Oberteil der Rückkehrkapsel zuerst in die Atmosphäre eingetreten sein. Die thermischen Belastungen beschädigten die nicht mit einem so starken Hitzeschutz versehene Oberseite, sorgten aber auch dafür, dass der Serviceteil schließlich abriss. Danach schwenkte die Kapsel in ihre normale Lage, mit dem Hitzeschutz voran. Das Fallschirmsystem wurde offenbar nicht beschädigt.
Es sei aber noch einmal darauf hingewiesen, dass der gerade geschilderte Hergang noch ungenügend durch Fakten belegt ist. Eine Untersuchungskommission wurde eingesetzt. Deren Bericht wird die genauen Ursachen für die Probleme bei der Landung von Sojus-TMA 11 offenlegen.