Auf der ILA 2016 in Berlin und beim Tag der offenen Tür des DFKI in Bremen wurde unter anderem ein autonomes robotisches System präsentiert, das als Vorstufe für Geräte zur unbemannten automatischen Erkundung in unterseeischen von Eis bedeckten Regionen anderer Planeten oder Monde betrachtet werden kann.
Ein Beitrag von Thomas Weyrauch. Quelle: Interview mit Marius Wirtz, DFKI.

(Bild: DFKI GmbH; Foto: Marius Wirtz)
Mit dem Projekt Europa-Explorer (EurEx) haben die Wissenschaftler und Techniker vom DFKI Planetenforschen eine Plattform geschaffen, auf deren Grundlage künftige Forschungsmissionen auf anderen Himmelskörpern erfolgen könnten. Insbesondere der Jupitermond Europa ist ein geeignetes, lohnendes Ziel. Raumfahrer.net hatte Gelegenheit, den am Projekt beteiligten Konstrukteur Dipl.-Ing. (FH) Marius Wirtz zu interviewen.
RN: Können Sie kurz schildern, was das DFKI ist, und welchen Aufgaben Sie dort nachgehen?
M. Wirtz: Das Deutsche Forschungszentrum für künstliche Intelligenz, kurz DFKI, ist ein bundesweit aufgestelltes Institut, das sich seit über 25 Jahren mit Themen zur künstlichen Intelligenz beschäftigt. Am Standort in Bremen, dem Robotics Innovation Center (seit 2006) beschäftigen wir uns vorwiegend mit der Forschung an künstlicher Intelligenz speziell in Bezug auf Robotersysteme.
Eine der Besonderheiten unseres Instituts ist dabei, dass wir in der Regel die Roboter an denen und mit denen wir forschen auch selber entwerfen, entwickeln und aufbauen. Hierbei werden die Systeme jeweils auf den konkreten Anwendungsfall zugeschnitten, um maximal erfolgreiche Ergebnisse im jeweiligen Szenario zu erzielen.
Ich selber bin als Konstrukteur tätig und entwickle den mechanischen und mechatronischen Anteil von Robotersystemen. Im Projekt Europa-Explorer habe ich mich mit der Entwicklung und Umsetzung der Eisschmelzsonde, dem sog. IceShuttle, beschäftigt und im letzten halben Jahr des Projekts zusätzlich die Projektleitung in Vertretung für meinen Kollegen Dr. Marc Hildebrandt übernommen.
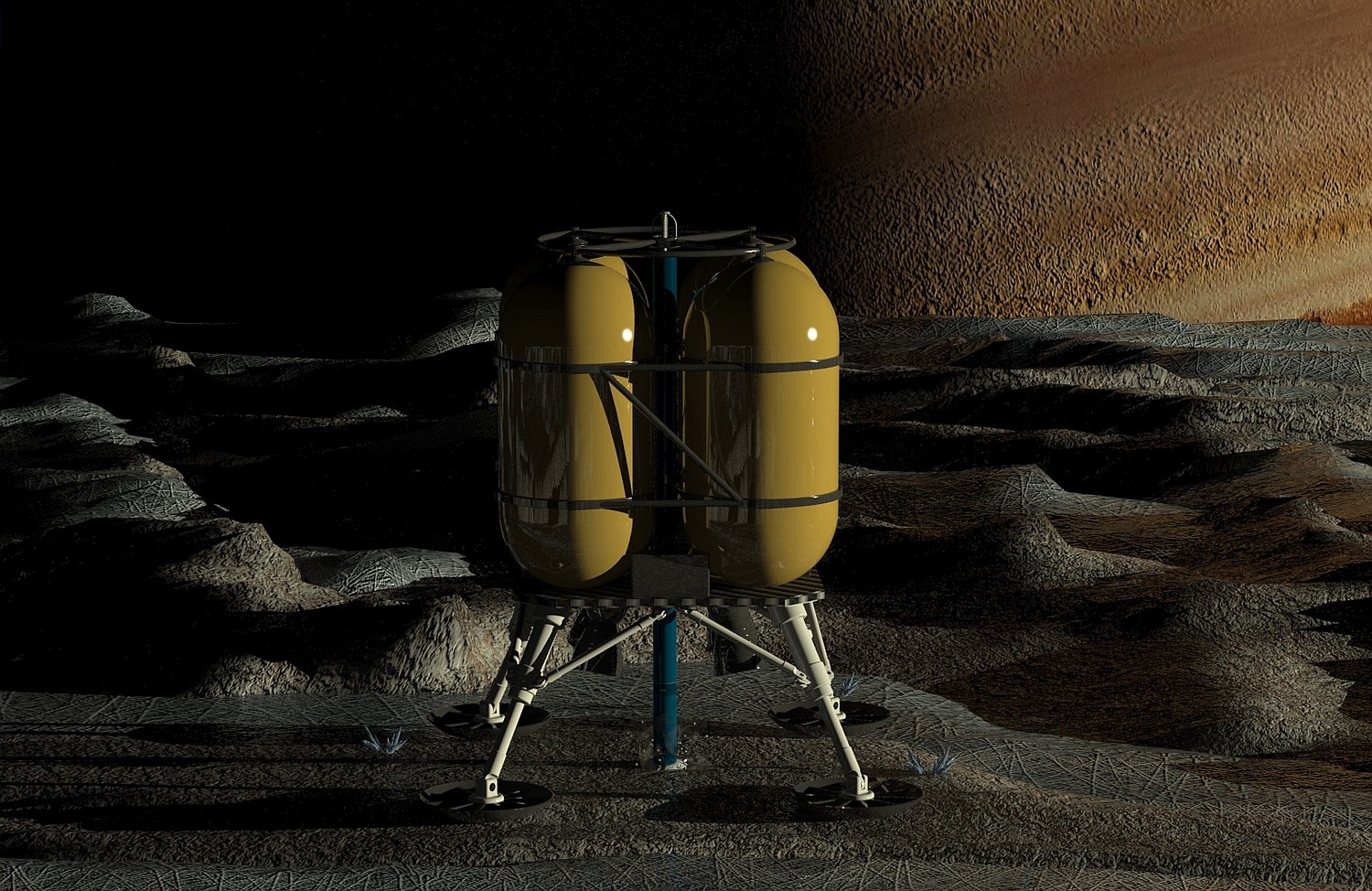
eines möglichen Landers (künstlerische
Darstellung) auf der Oberfläche des
Jupitermonds Europa. IceShuttle beginnt
therm. Bohrvorgang.
(Bild: DFKI GmbH; Foto: Meltem Yilmaz)
RN: EurEx beschäftigt sich mit Technologie, die auf dem Jupitermond Europa auf dem Eis und unter Wasser verwendet werden könnte. Wie kam es zu der Initiative, sich genau mit diesem Thema auseinanderzusetzen?
M. Wirtz: Das Forschungsvorhaben wurde nach einer Anregung des DLR-Raumfahrtmanagements beantragt. Zuvor gab es von anderen deutschen Forschungsgruppen bereits ähnliche Projekte die sich mit einem vergleichbaren Thema beschäftigt haben, jedoch kein Projekt das speziell auch den Unterwasseranteil mit berücksichtigt hat, wie es eine Mission zu Jupitermond Europa erfordert. Mit unseren Kompetenzen der Robotik, sowohl im Weltraum als auch im Unterwasserbereich konnten wir dann das Projekt Europa-Explorer erfolgreich beantragen.
Ich persönlich fand das Thema bereits im Vorhinein äußerst spannend und war umso glücklicher als sich die Möglichkeit für das Projekt Europa-Explorer ergab.
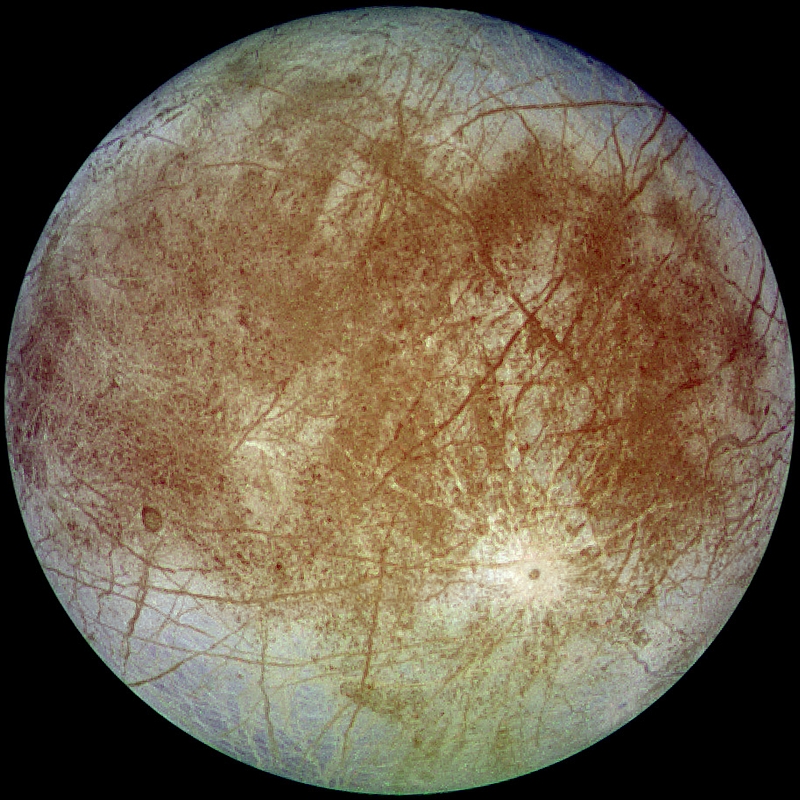
Sonde Galileo am 7. September 1996)
(Bild: NASA/JPL/DLR)
RN: Warum ausgerechnet Europa? Was macht den Mond für die Wissenschaft so interessant?
M. Wirtz: Europa ist ein Eismond im Jupitersystem. Hier wird nach jetzigen wissenschaftlichen Erkenntnissen unter einer dicken äußeren Kruste aus Wassereis ein globaler Ozean vermutet der nach bisherigen Schätzungen 2-3 mal soviel Wasser fasst wie flüssiges Wasser auf der Erde existiert. Da flüssiges Wasser eine der fundamentalen Voraussetzungen für Leben ist, stellt Europa mit diesen enormen Wasservorkommen einen äußerst vielversprechenden Ort für Exobiologen dar. Leben neben der Erde auch an einem anderen Ort im Sonnensystem zu finden wäre eine unglaublich wichtige und spannende Entdeckung. Hier verbinden sich viele fundamentale Fragestellungen.
Neben der Fragestellung „Gibt es Leben außerhalb der Erde?“ gibt es Überlegungen wie „Basiert das extraterrestrische Leben auf den gleichen grundlegenden Mechanismen/Bausteinen wie auf der Erde oder gibt es andere Mechanismen?“. Besonders spannend wäre, wenn es sich dabei um bisher noch unbekannte Mechanismen handeln würde, wodurch sich sogar ganz neue Forschungsfelder auftun könnten. Eine andere Frage wäre: „Hat das Leben auf der Erde und potentielles Leben auf anderen Himmelskörpern den selben Ursprung, oder ist das Leben unabhängig voneinander entstanden und kann somit überall dort, wo die richtigen Umgebungsbedingungen herrschen, entstehen?“.
Das sind grundlegende Fragen, die die Wissenschaftler in den entsprechenden Fachgebieten antreiben. Wir möchten einen Weg und die entsprechenden Tools dazu aufzeigen, die den Kollegen diese Forschung, zumindest in Bezug auf den Jupitermond Europa, ermöglichen könnte.
RN: Welche Einrichtungen und Spezialisten wurden bei Fragen zu den Bedingungen auf Europa zu Rate gezogen? Wie konkret waren die Auskünfte, die das DFKI erhalten konnte?
M. Wirtz: Für Fragen zu den Umgebungsbedingungen auf Europa wurde das Max-Planck-Institut für Sonnensystem Forschung (kurz: MPS) aus Göttingen als beratende Institution beauftragt. Die Wissenschaftler des MPS haben uns dabei mit den aktuell verfügbaren Erkenntnissen und Annahmen versorgt.
Um eine tatsächliche Mission planen zu können fehlen allerdings noch konkretere Daten, besonders über den genauen Aufbau der Eisdecke. Also z.B. wie dick ist das Eis genau, wie ist die geographische Verteilung der Eisdicke und der innere Aufbau. Hier gibt es eine Reihe von noch ungeklärten Detailfragen, z.B. ob Wassereinschlüsse bzw. Wasserblasen im Eis vorhanden sind oder wie hoch der Feststoffanteil innerhalb der Eiskruste ist.
Eine weitere wichtige und heftig diskutierte Fragestellung: „Ist ein direkter scharfer Übergang zwischen der festen Phase des Eises und der flüssigen Phase des Ozeans vorhanden oder existiert hier eine Grenzschicht aus einem Wasser/Eisgemisch?“ Sie ist für die Positionierung einer Eisschmelzsonde von großer Wichtigkeit.
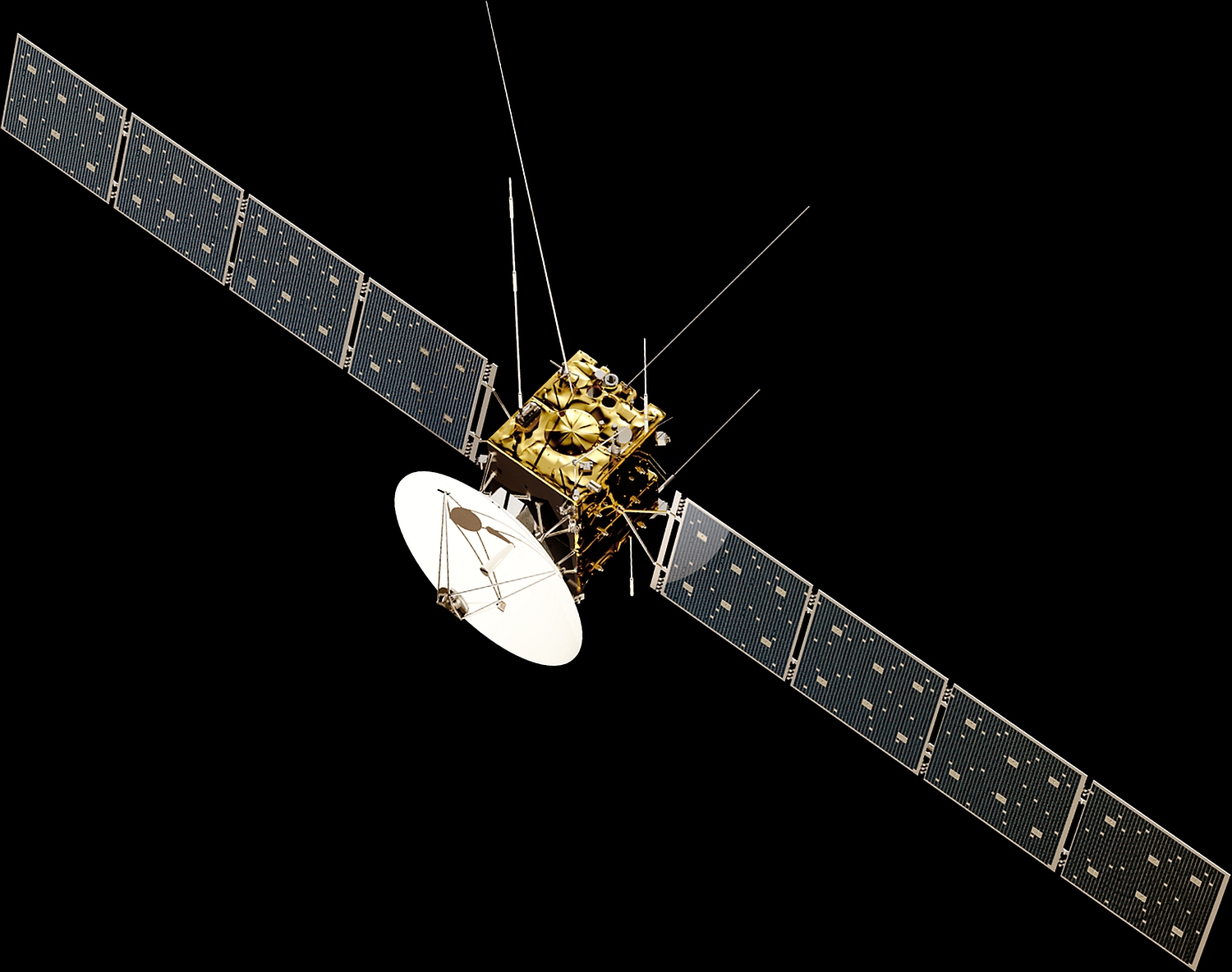
künstlerische Darstellung.
(Bild: ESA / ATG medialab)
Neue Erkenntnisse über einen Teil dieser Fragestellungen werden die Sonden JUICE (ESA) und Europa-Clipper (NASA) liefern, die im nächsten Jahrzehnt zum Jupiter aufbrechen sollen.
RN: Welche besonderen Umgebungsbedingungen auf Europa mussten beim Entwurf der Erkundungs-Roboter berücksichtigt werden?
M. Wirtz: Ein Bereich, bei dem möglichst genau auf die Umgebungsbedingungen eingegangen wurde, ist die Navigation. Beispielsweise besitzt unser Autonomous Underwater Vehicle (AUV) namens Leng bewusst keinen Kompass, da noch zu wenig über das Magnetfeld von Europa bzw. Jupiter bekannt ist, trotzdem muss es aber vollautonom navigieren können. Dies wurde durch eine ganze Reihe verschachtelter Mechanismen und Navigationsmodalitäten sicher gestellt.
Ein wichtiger Aspekt beim Design der Systeme war, die Systeme äußerst kompakt zu gestalten und mit einem geringen Querschnitt zu versehen, um den zu schmelzenden Eiskanal klein und die dafür benötigte Energie gering zu halten. Darüber hinaus mussten die Systeme in enger Abstimmung zueinander entwickelt werden, um das AUV in das IceShuttle integrieren zu können, ohne hierbei die Restriktionen in den Abmessungen zu sehr zu beeinträchtigen.
Ein weiterer Punkt ist zudem, dass die Systeme natürlich wasserdicht sein müssen und dabei einen hohe Korrosions- und Druckstabilität liefern sollen. Eine Aufgabe, die besonders bei Mechanismen und Aktuatoren nicht zu unterschätzen ist.
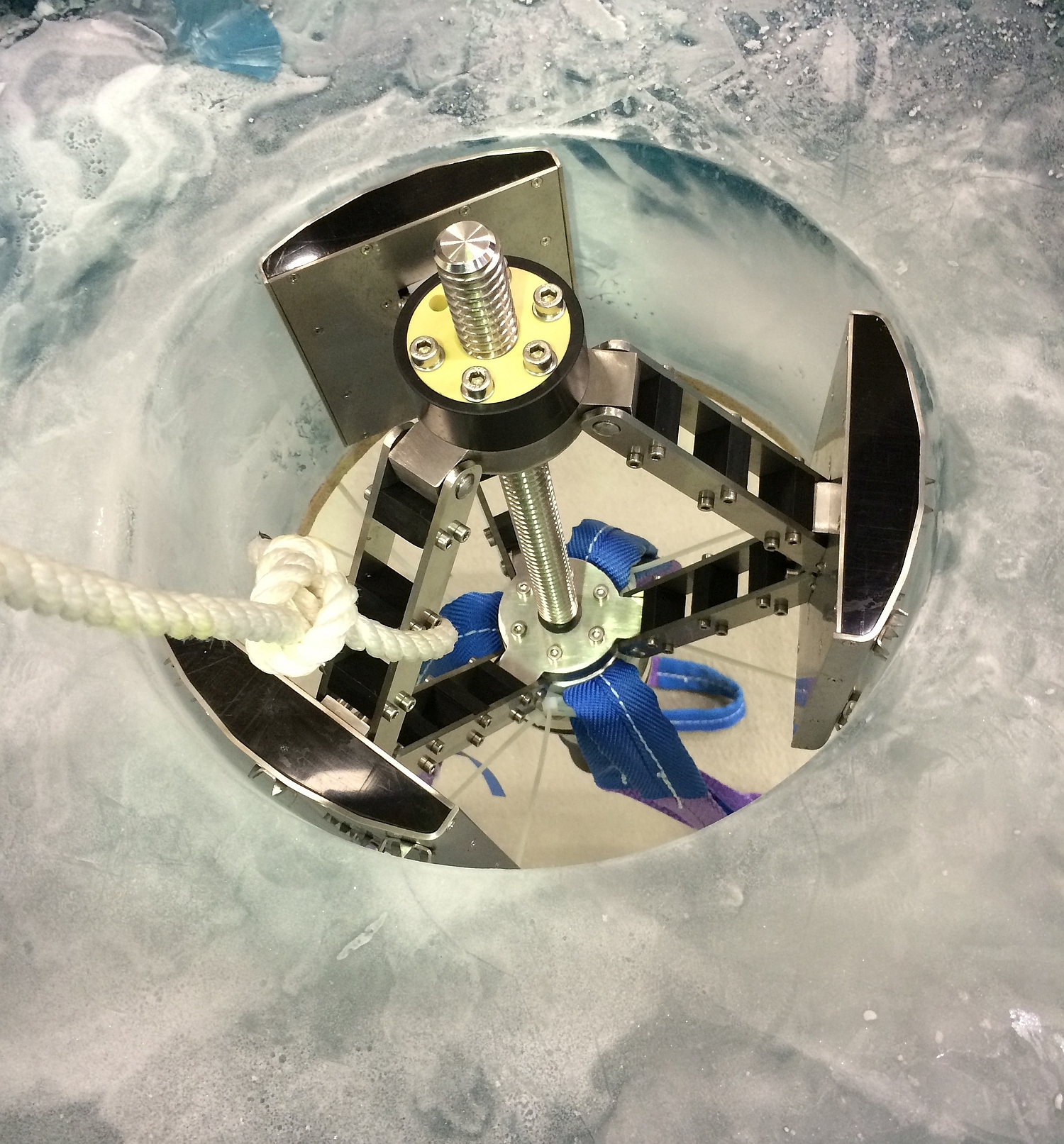
am Ende des Eiskanals.
(Bild: DFKI GmbH; Foto: Marius Wirtz)
RN: Was konnte nicht berücksichtigt werden?
M. Wirtz: Was zurzeit nicht berücksichtigt wurde ist die Druckstabilität für die volle Tauchtiefe bis zum Grund des Ozeans, sowie Vorkehrungen, die die Umgebungsbedingungen im Weltraum berücksichtigen, also geringer Druck und hohe Strahlungsintensität, die in der Umgebung von Europa vorherrschen. Sowohl die Druckstabilität als auch die Strahlungsintensität zu berücksichtigen ist sehr aufwändig und äußerst kostenintensiv und in diesem Stadium der Untersuchung daher nicht sinnvoll. Sie hätte zudem das Budget um ein Vielfaches überschritten.
RN: Welche Anhaltspunkte für Leben liefern die auf Europa vermuteten Umweltbedingungen?
M. Wirtz: Die Beantwortung dieser Frage würde ich gerne den Fachkollegen überlassen.
RN: Wurde das AUV so ausgerüstet, dass es Hinweise auf Leben entdecken könnte?
M. Wirtz: In diesem ersten Projekt haben wir uns vorwiegend mit dem Missionskonzept, der Entwicklung und dem Aufbau der Systeme, sowie mit der für das Gelingen der Mission fundamental wichtigen Navigation des Explorations-AUVs in der Wassersäule beschäftigt.
Das AUV ist bereits jetzt mit einer vergleichsweise hohen Zahl an Sensoren bestückt. Diese Sensoren, vorwiegend akustische Sensoren und Kameras, dienen allerdings alle dazu die für die Mission notwendige Autonomie des Fahrzeugs zu ermöglichen.
Ein Teil der Sensoren, z.B. die Kameras, könnten jedoch ebenfalls für die Suche nach Hinweisen von Leben verwendet werden. In einem möglichen Folgeprojekt möchten wir dann tatsächlich auch eine wissenschaftliche Nutzlast in das Fahrzeug integrieren, um auch chemische oder biologische Anhaltspunkte für Leben detektieren zu können.
RN: Wo Kameras zum Einsatz kommen sollen, wird auch Licht benötigt. Welche Leuchtmittel befinden sich an Bord des AUV?
M. Wirtz: Die Sichtbereiche der Kameras werden mit lichtstarken und energieeffizienten weißen LEDs ausgeleuchtet. Für die Bodenkameras, die unter anderem als Sensor zur visuellen Odometrie verwendet werden, kommt hier eine „Flasher“-Variante zum Einsatz. Durch das kurzzeitige Blitzen mit sehr hoher Lichtintensität (bis zu 45.000 Lumen) im Millisekundenbereich (circa 10 ms), welches auf die Dauer der Belichtungszeit der Kameras abgestimmt und mit dieser synchronisiert ist, soll dabei das Verhältnis zwischen optimalen Belichtungsverhältnissen und Energieeffizienz der Beleuchtungseinheit verbessert werden.
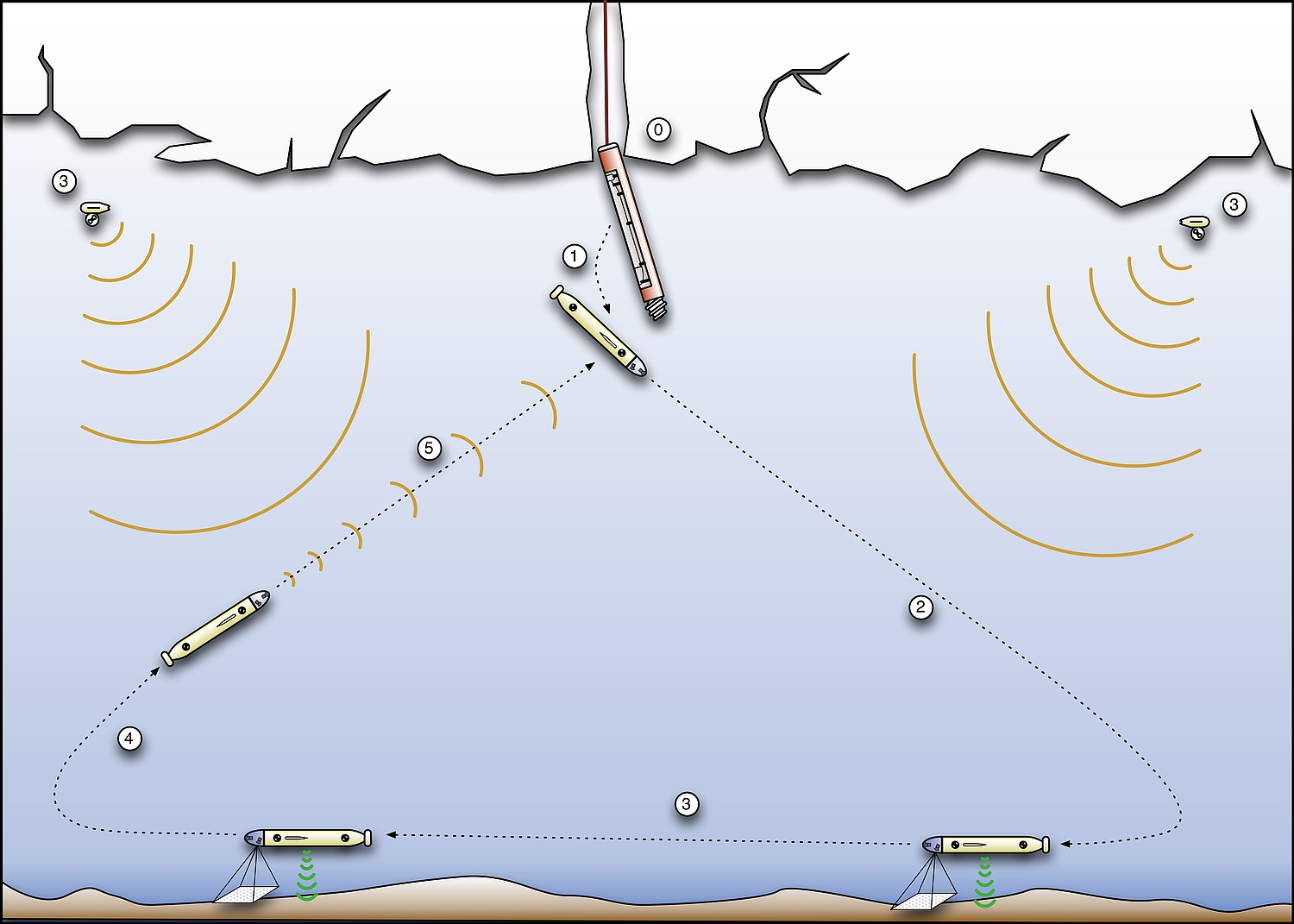
0: Eisschicht wurde durchdrungen.
1: Aussetzen des AUV.
2: Tauchzellen bringen AUV zum Grund.
3: Navigation über dem Boden, Nutzung
von sg. Glidern.
4: Aufstieg des AUV. 5. Anvisieren der
Basisstation.
(Bild: DFKI GmbH; Foto: Jan Albiez)
RN: Was ist an der Ausstattung des AUV noch besonders bemerkenswert?
M. Wirtz: Das Explorations-AUV ist angesichts der Menge an Sensoren, die es mitführt, sehr kompakt gebaut. Es besitzt einen äußerst geringen Querschnitt, um den Anforderungen an die Eisschmelzsonde gerecht zu werden.
Dann verfügt es über eine Vielzahl teilweise redundanter Sensoren, die der autonomen Navigation dienen (Unterwassernavigationssystem Ultra Short Baseline (USBL), Obstacle-Avoiding-Sonar, 3-Achs Faseroptisches-Gyroskop, duales Doppler Velocity Log (DVL) mit acoustic Doppler current profiler Modus (ADCP), Stereo-Hydrophon, Stereokamera für visuelle Odometrie etc.).
Darüber hinaus besitzt das AUV neben drei elektrischen Propellerantrieben noch zwei Tauchzellen, die es dem Fahrzeug ermöglichen sollen, den Grund des Ozeans mit minimalem Energieaufwand zu erreichen. Außerdem ist ein Teil der Sensoren ein- bzw. ausfahrbar, um den Anforderungen der Integration in das IceShuttle gerecht zu werden.
Die Recheneinheiten sind ebenfalls mehrschichtig und teilweise Redundant ausgelegt. So gibt es drei Leistungsebenen, die nach Bedarf zu/abgeschaltet werden können. Dies ist neben der Redundanz auch für den Energiehaushalt wichtig.
RN: Können Sie die verwendeten Recheneinheiten etwas genauer beschreiben? Können Sie uns beispielsweise sagen, welche CPU-Kerne zum Einsatz kommen und welche Programmiersprache verwendet wird? Wie viel Speicherplatz steht den Recheneinheiten zur Verfügung?
M. Wirtz: Bei den Recheneinheiten handelt es sich um die folgenden drei Systeme:
- STM32 ARM-Microcontroller, 256kB Flash
- Intel Atom Low-Power CPU, 512GB SSD/1GB RAM
- Intel i7, 2TB SSD/4GB RAM
Als Programmiersprache verwenden wir C++ für die Kernalgorithmik, sowie Ruby für das Zusammenschalten von Funktionseinheiten.

Maritimen Explorationshalle des DFKI RIC
in Bremen.
(Bild: DFKI GmbH; Foto: Annemarie Popp)
RN: Das AUV wird ja einige Wegstrecken zurücklegen müssen. Wie wird es angetrieben?
M. Wirtz: Das Fahrzeug wird zum einen über elektrische Ring-Thruster angetrieben, die über Akkus gespeist werden. Die Akkus müssen bei jedem Koppelvorgang mit der Basisstation, dem IceShuttle, wieder aufgeladen werden.
Die großen Distanzen beim Tauchen zum Grund des Ozeans sollen deutlich energiesparender zurückgelegt werden. Hierbei gleitet das Fahrzeug durch Umtarieren der Tauchzellen mit geringem Energieaufwand zum Grund des Meeresbodens. Bei diesem Tauchvorgang sollen ein Großteil der Sensoren und energieintensiven Rechner abgeschaltet werden, um zusätzlich Energie zu sparen. Am Meeresgrund angekommen wird das Fahrzeug dann wieder neutral tariert und wieder die elektrischen Antriebe verwenden, bis es zum Auftauchen erneut umtariert wird.
RN: Wie kann man sich das Umtarieren der Tauchzellen vorstellen? Auf welche Weise kommt dabei ein vertikaler Vortrieb zustande?
M. Wirtz: Die aktuelle Version der Tauchzellen besteht aus einem zylindrischen Metallgehäuse, in dem ein Kolben mittels drehmomentstarken Elektromotor verfahren werden kann. Hierbei gibt es einen trockenen, gedichteten Bereich der Tauchzelle und einen Nassbereich, der quasi zum umgebenden Wasser hin offen ist. Das Volumen des Trockenbereichs kann durch Verfahren des Kolbens vergrößert oder verkleinert werden, wodurch sich der Auftrieb des Fahrzeugs ändert. Dies ist möglich, da Luft im Vergleich zum Wasser stark kompressibel ist.
Da das AUV über eine Tauchzelle am Bug und eine identische Tauchzelle am Heck verfügt kann neben dem Auf- bzw. Abtrieb auch der Nickwinkel des Fahrzeugs (eng.: pitch) eingestellt werden. Dabei wirkt die ganze Strömungshülle des AUVs wie eine einfache Tragfläche, die diese Vertikalbewegung in eine Horizontalbewegung umwandelt.
Kopplung des AUVs.
(Bild: DFKI GmbH; Foto: Jan Albiez)
RN: Auf welche Art und Weise wird das AUV mit der benötigten elektrischen Energie versorgt?
M. Wirtz: Das AUV verfügt derzeit über einen Litium-Polymer Akku, der für circa 10 Stunden aktive Laufzeit ausreicht. Vor Ende der Laufzeit soll das Fahrzeug wieder an seine Basisstation ankoppeln und die Akkus sollen neu aufgeladen werden.
Wie die Basisstation (das IceShuttle) über die gesamte Zeit mit Energie versorgt werden soll ist noch offen. Hier gibt es mehrere Ansätze, die allerdings zur Zeit nicht Bestandteil unserer Untersuchung sind.
bzw. dem Schmelzmodul aus betrachtet.
(Bild: DFKI GmbH; Foto: Jan Albiez)
RN: Wo würde ein AUV-artiges Fahrzeug auf Europa suchen?
M. Wirtz: Natürlich würde es zunächst die nähere Umgebung um seine Basisstation IceShuttle erkunden. Am interessantesten wird aber sicherlich der Grund des Ozeans sein, wo man sich Umgebungsbedingungen erhofft, die Leben ermöglichen. Hier auf der Erde sind ein Beispiel dafür die hydrothermalen Quellen auf dem Grund des Ozeans, sog. Schwarze Raucher, die auch an entlegenen, unwirtlichen Stellen der Tiefsee lokale Ökosysteme bzw. Oasen des Lebens ermöglichen. Vergleichbare Bedingungen erhofft man sich auch auf dem Grund des Ozeans von Europa.
RN: Wie könnte ein AUV-artiges Fahrzeug zu seinem Einsatzort kommen?

Videodarstellung des Missionszenarios
als Exponat im Space-Pavillion der ILA 2016.
(Bild: DFKI GmbH; Foto: Marius Wirtz)
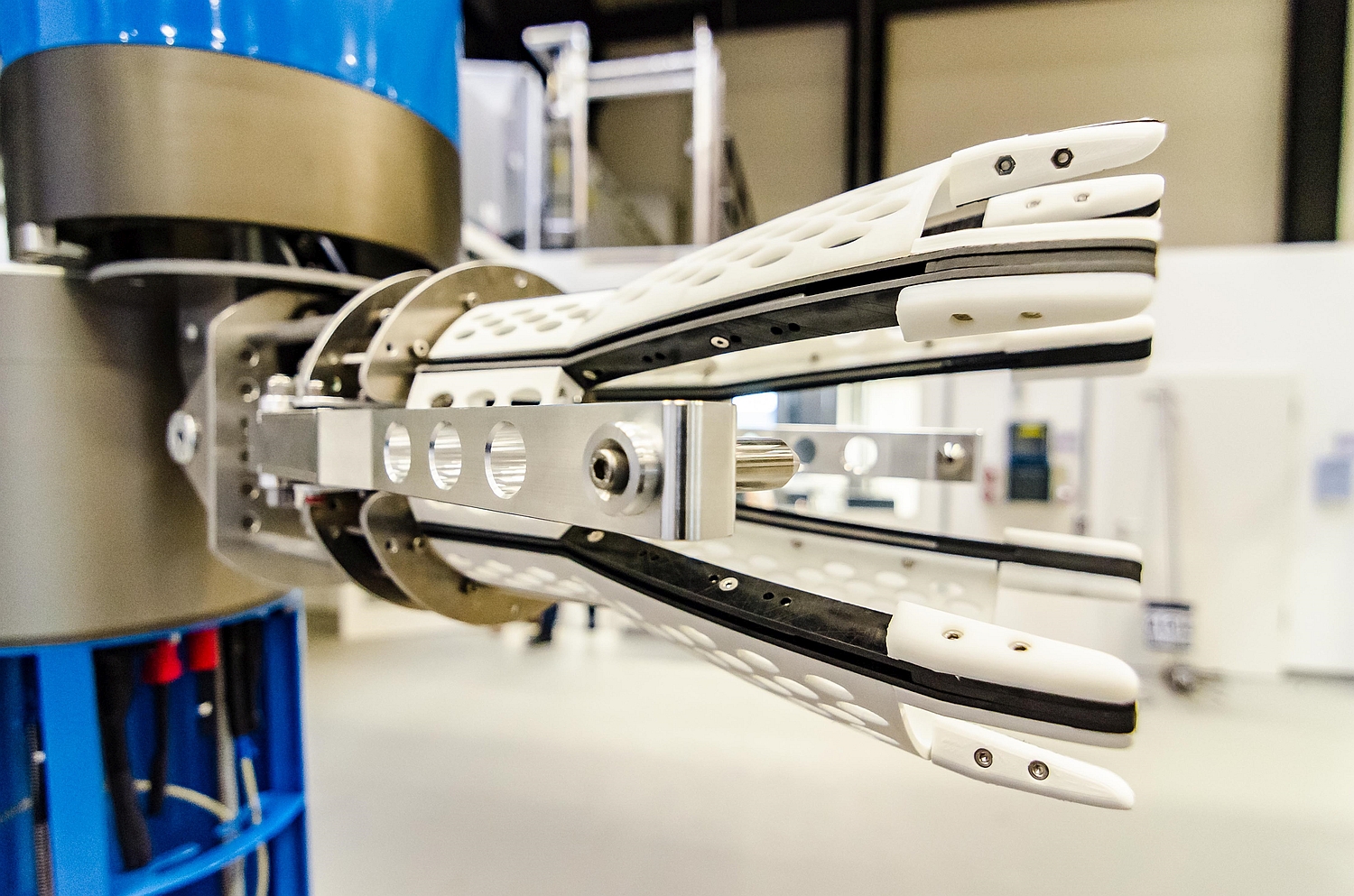
M. Wirtz: Eins der Alleinstellungsmerkmale des Projekts Europa-Explorer ist, dass wir uns nicht nur mit entweder einem Explorationsfahrzeug für den Ozean oder einer Eisschmelzsonde beschäftigt haben, sondern innerhalb des Projekts die gesamte Mission angefangen von der Oberfläche des Jupitermonds abbilden wollten. Hierzu gehört natürlich auch der Transport des Explorationssystems durch die dicke Wassereiskruste von Europa und entsprechend wurde neben dem Explorations-AUV Leng noch ein weiteres System, das IceShuttle Teredo entwickelt.
Das IceShuttle ist eine Eischmelzsonde, die über ein großes Nutzlastkompartement verfügt und somit das AUV in seinem „Bauch“ durch das Eis transportieren kann. Das IceShuttle soll sich dabei gravimetrisch durch das Eis schmelzen, indem sowohl die Nase als auch die Seitenflächen kontrolliert beheizt werden.
Eine Herausforderung ist außerdem das Ausbringen des AUVs aus dem IceShuttle, da hier unterschiedliche Anforderungen berücksichtigt werden müssen.
RN: Wie lange würde das Durchdringen von einem Kilometer Eis denn dauern?
M. Wirtz: In dem abgeschlossenen Projekt Europa-Explorer wurde der Fokus nicht auf den Vortrieb des IceShuttles gelegt, sondern auf die Navigation und Autonomie des AUVs, sowie die Kombination von AUV und IceShuttle.
Mit der Verbesserung der Schmelztechnologie beschäftigen sich bereits andere Forschungsgruppen wie die Kollegen der FH-Aachen des verwandten Projekts Enceladus-Explorer. Somit haben wir uns zumindest für diese erste Projektphase auf einen einfachen Schmelzkopf beschränkt.
Bei Tests mit nur unserem Schmelzkopf alleine haben wir unter einfachen Bedingungen Schmelzgeschwindigkeiten von circa 0,8 Meter pro Stunde erreicht. Wegen der großen Länge des IceShuttles wird außerdem noch eine Beheizung der Seitenflächen benötigt, die zurzeit noch nicht implementiert ist.
Würde man die Ergebnisse des jetzigen Schmelzkopf zu Grunde legen, würde das IceShuttle für einen Kilometer rund 52 Tage benötigen. Bei einer detailierteren Auseinandersetzung mit der Fortbewegung des IceShuttle könnte man aber sicher auch deutlich bessere Ergebnisse erzielen.
RN: Wie würde die Orientierung auf Europa erfolgen?
M. Wirtz: Die Navigation ist für unser autonomes Unterwasserfahrzeug von größter Wichtigkeit. Das Fahrzeug muss unter allen Umständen in der Lage sein zurück zur Basisstation, dem IceSchuttle, zu finden, bevor die Energie des Akkus zur Neige geht. Dabei ist die Navigation in der Wassersäule, in der es keine festen Referenzpunkte und möglicherweise Strömung gibt, generell eine schwierige Aufgabe.
Für die Navigation werden im Falle unseres AUVs eine Vielzahl akustischer Sensoren verwendet, die z.B. per Koppelnavigation die Position des Fahrzeugs schätzen. Dazu werden unter anderem kleine akustische Navigationsbarken in Form von Microglidern ausgebracht, die sich in einem möglichst großem Abstand von der Basisstation (dem IceShuttle) unter dem Eis verankern und dann als Referenzpunkte zur Korrektur der Koppelnavigation verwendet werden.
Neben den akustischen Sensoren verfügt das AUV außerdem über weitere Systeme für die Navigation. Beispielsweise gibt es ein Stereokamerasystem, das mittels visueller Odometrie zur Schätzung von Position und Orientierung die Navigation am Meeresboden verbessert.

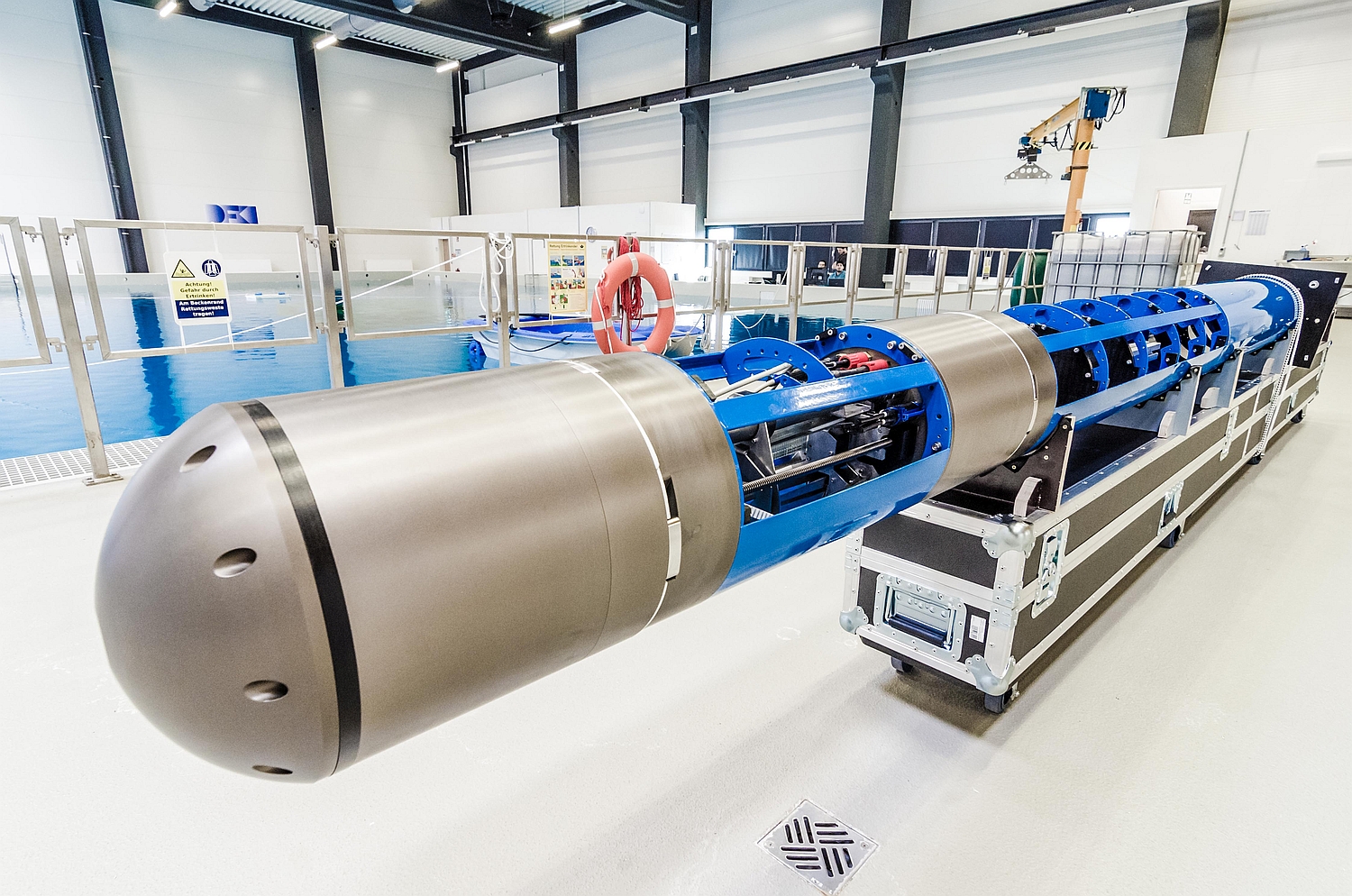
Systeme Leng und Teredo im Großen
Becken der Maritimen Explorationshalle
des DFKI RIC in Bremen.
(Bild: DFKI GmbH; Foto: Annemarie Popp)
RN: Warum ist eine gute Unterwassernavigation so wichtig?
M. Wirtz: Es ist wie bereits geschildert von äußerster Wichtigkeit, dass das AUV immer in der Lage ist, sicher zurück zu Basisstation (dem IceShuttle) zu finden. Da es sich um ein kabelloses, voll autonomes Fahrzeug handeln muss, das über einen Akku als Energiequelle verfügt und darüber hinaus eine nennenswerte Funkkommunikation zur Basisstation durch das Wasser nicht möglich ist, ist das sichere Zurückfinden zum Ausgangsort entscheidend für den Erfolg der gesamten Mission.
Gelingt es dem AUV nicht, die Basisstation zu erreichen, bevor die Energie des Akkus verbraucht ist, sind Fahrzeug, durch den fehlenden breitbandigen Kommunikationskanal unter Wasser alle errungenen wissenschaftlichen Daten, sowie das Bildmaterial verloren – und die Mission wäre gescheitert.
RN: Von Raumfahrzeugen kennen wir sogenannte Safemodes, die im Fehlerfall mit einem Rückfall auf ein ganz grundlegendes Betriebsregime sicherstellen sollen, dass es auf jeden Fall eine Möglichkeit gibt, den vorgesehenen Regelbetrieb wieder aufzunehmen. Wenn etwas nicht funktioniert: Wie gehen AUV und IceShuttle damit um?
M. Wirtz: Im Rahmen des Projekts arbeiten wir auch an einer Selbstüberwachung des AUVs. Eine spezielle Recheneinheit, das „System-Management-Board“, überwacht dabei die Ein- und Ausgaben der wichtigsten Aktoren und Sensoren und überprüft deren Plausibilität.
In Zukunft sollen so Fehlfunktionen früh erkannt und auf diese automatisch reagiert werden. Wir sind hierbei allerdings noch ganz am Anfang unserer Arbeit und wollen diese in einem Folgeprojekt weiter vertiefen. Die angesprochene Recheneinheit dient außerdem beim Abtauchen zum Meeresgrund dazu, überflüssige Sensoren und Recheneinheiten abzuschalten und das Fahrzeug so mit einem minimalen Energieverbrauch betreiben zu können.
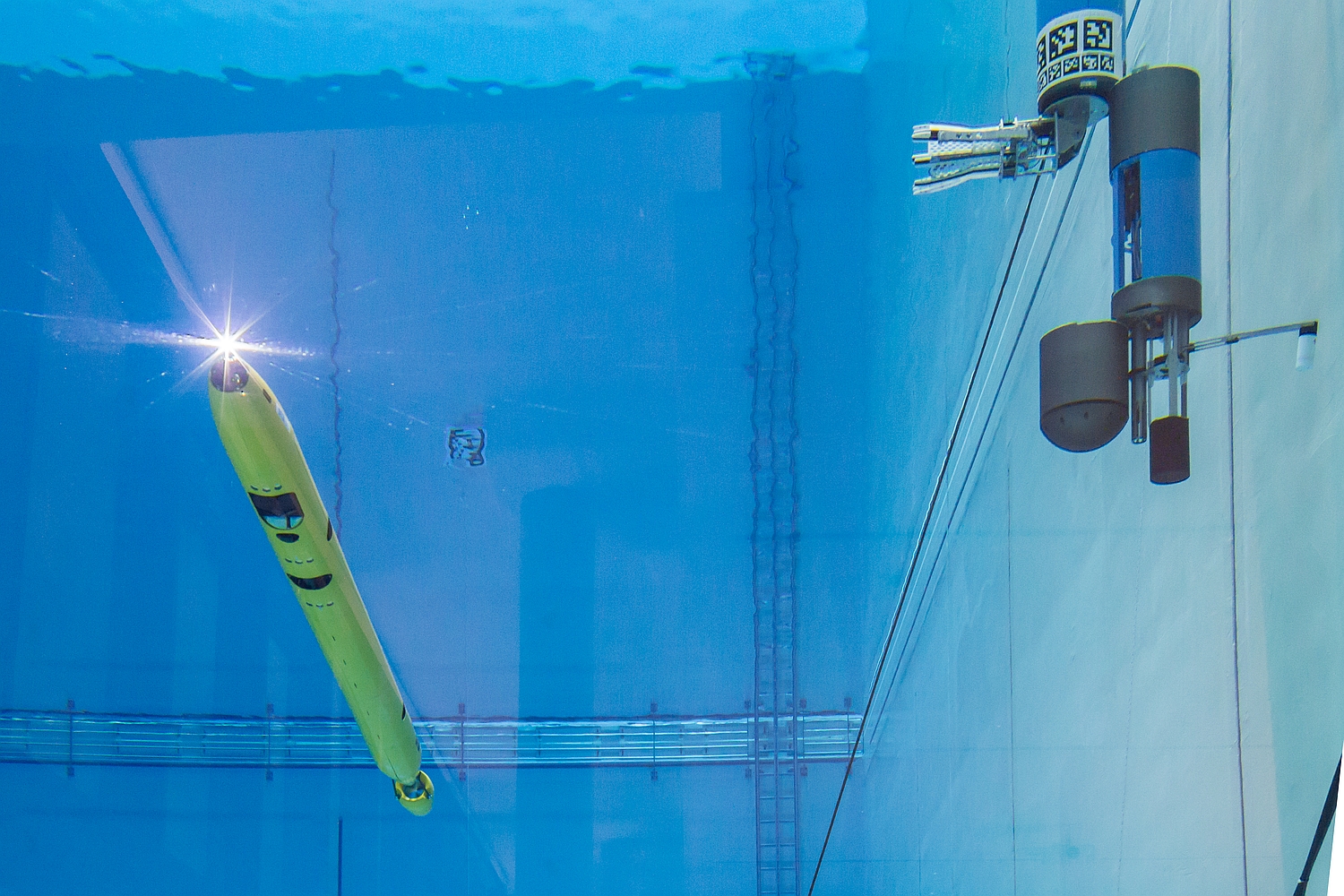
RN: Wie haben Sie das Szenario für den Mond Europa auf der Erde nachgestellt?
M. Wirtz: Im Rahmen einer Abschlusspräsentation zum Ende des Projekts wurde die grundlegende Idee des Missionskonzept in unserem großen Experimentalbecken in abstrahierter Form nachgestellt und demonstriert.
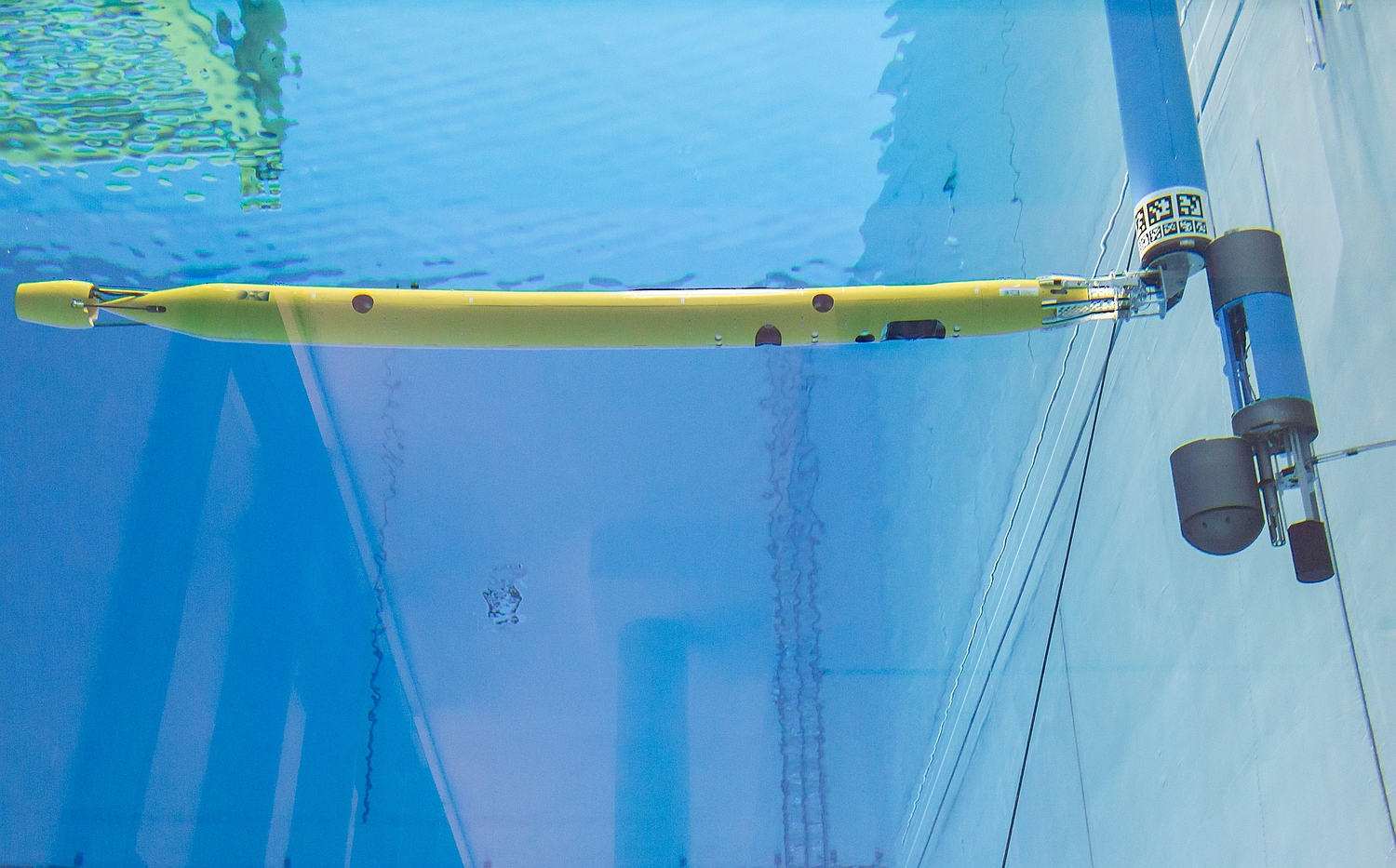
IceShuttle Teredo (Unterwasserperspektive).
(Bild: DFKI GmbH; Foto: Annemarie Popp)
RN: Wo wurden die autonomen Fahrzeuge schon ausprobiert? Sind Sie zufrieden mit den erzielten Ergebnissen?
M. Wirtz: Tests wurden bisher vorwiegend in unserern umfangreichen Laboreinrichtungen wie z.B. unserem großen Salzwasserbecken (23 m x 19 m x 7,8 m) durchgeführt. Außerdem gab es bereits vereinzelte Ausfahrten zu einem nahe gelegenen See. Auch wenn es natürlich noch eine ganze Reihe von Verbesserungsansätzen insbesondere in Bezug auf die Systemverfügbarkeit gibt, sind wir sehr stolz darauf, dass wir innerhalb der Projektlaufzeit eine vollautonome Mission realisieren konnten.
RN: Gibt es weitere Orte, an denen man AUV und IceShuttle testen möchte?
Teredo (Unterwasserperspektive).
(Bild: DFKI GmbH; Foto: Annemarie Popp)
M. Wirtz: Als nächsten Schritt würden wir mit unseren Systemen natürlich gerne aus dem Labor in eine Umgebung wechseln die etwas realere Bedingungen abbildet. Hier wäre sicherlich ein erster Schritt der Test in einem Binnengewässer in Skandinavien im Winter. Darüber hinaus würden wir natürlich auch gerne an Expeditionen in Polarregionen teilnehmen und uns hier Schritt für Schritt an immer größere Herausforderungen heran tasten.
RN: Könnte man mit Hilfe der Fahrzeuge des DFKI auch auf der Erde Formen von Leben finden, von denen man jetzt noch nichts weiß?
M. Wirtz: Wir beschäftigen uns wie ja bereits beschrieben vorwiegend mit den Technologien, die anderen Wissenschaftlern ermöglichen sollen zu außergewöhnlichen Orten zu gelangen, zu denen sonst kein Zugang besteht, nicht aber direkt mit der Suche nach Leben selber. Daher hängt diese Frage natürlich auch ein wenig von der wissenschaftlichen Nutzlast der Kollegen ab.
Generell würden wir uns aber als Fernziel, wenn unsere Fahrzeuge noch etwas erwachsener geworden sind, wünschen, abgeschnittene Orte wie die subglazialen Seen in der Antarktis, z.B. den Wostoksee, zu erkunden. In subglazialen Seen erhofft man sich von der Außenwelt abgeschlossene Ökosysteme und dort würde vielleicht eine Chance bestehen, eine noch unbekannte Tier- oder Pflanzenart zu entdecken.
RN: Was könnten AUV und IceShuttle oder Nachfolger auf der Erde sonst leisten?
M. Wirtz: Zunächst können die Fortschritte, die beim AUV in Bezug auf Navigation und Autonomie errungen werden, zu Gunsten von autonomen Unterwasserfahrzeugen generell verwendet werden. Das betrifft sowohl industrielle z.B. Offshoreinspektionsaufgben, sowie die Verbesserung autonomer Systeme als wissenschaftliche Plattform z.B. für ozeanographische Anwendungen.
Die Kombination beider Systeme (AUV und IceShuttle) könnte besonderes für die Erforschung von Polarregionen hilfreich sein. Eine ganz besondere Anwendung wäre, wie bereits erwähnt, die Erforschung subglazialer Seen in der Antarktis, wie z.B. dem Wostoksee. Diese im Eis eingeschlossenen Wasserblasen stellen außerdem die beste, auf der Erde verfügbare Analogumgebung für die Vorbereitung einer Mission zum Jupitermond Europa dar.
RN: Gibt oder gab es eine in Planung befindliche Raumfahrtmission, für die das DFKI mit AUV und IceShuttle maßgebliche Vorarbeit geleistet hat?
M. Wirtz: Derzeit gab es eine solche Kooperation noch nicht.
RN: AUV und IceShuttle wurden auf der ILA in Berlin präsentiert. Wie ist das Projekt vom Fachpublikum aufgenommen worden?
M. Wirtz: Ich denke das Thema stößt auf Grund der ungewöhnlichen Randbedingungen generell auf großes Interesse, so auch auf der ILA.
RN: Vielen Dank für dieses Interview Herr Wirtz.
DFKI-Europa-Explorer-Videos bei YouTube: