Im August 2014 vermehrt aufgetretene Computerprobleme waren der Grund dafür, dass Anfang September eine Neuformatierung des Flash-Speichers des Marsrovers Opportunity erfolgte. Die damit verbundenen Arbeiten konnten erfolgreich abgeschlossen werden und der Rover hat seine Fahrt mittlerweile fortgesetzt.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, UMSF-Forum.
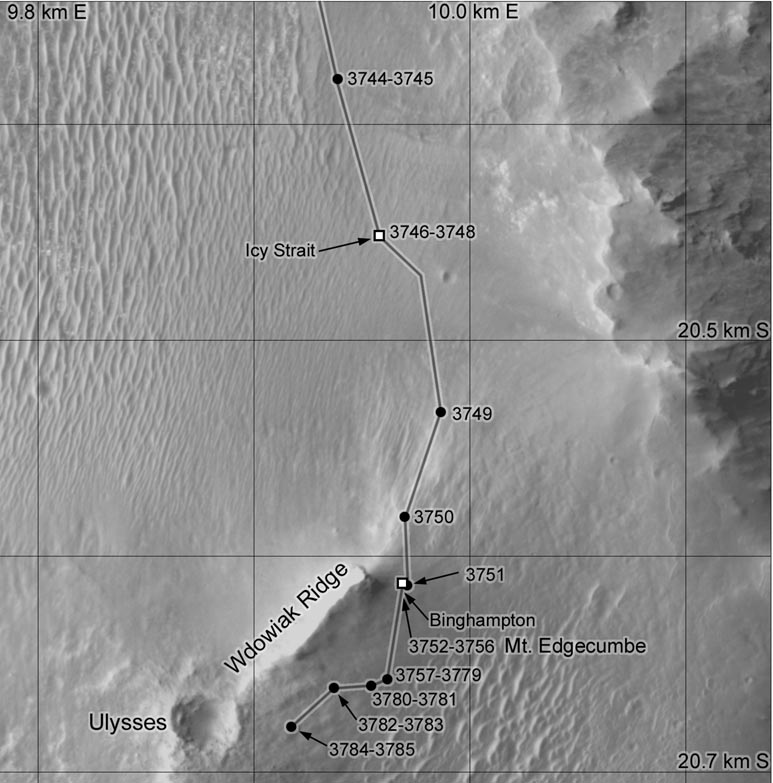
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Im August 2014 führte ein Problem mit dem Flash-Speicher des Bordcomputers dazu, dass sich der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Opportunity mehrfach in einen Sicherheitsmodus versetzte. Daten konnten nicht wie beabsichtigt im Flash-Speicher abgelegt und gespeichert werden, was dazu führte, dass der Bordcomputer dadurch bedingt einen ‚Reboot‘ ausführte. Als Reaktion auf den dadurch automatisch ausgelösten Computer-Reset stoppte der Rover alle weiteren für diesen Tag vorgesehenen Aktivitäten und versetzte sich stattdessen in einen als „Automode“ bezeichneten Zustand, in dem der Rover lediglich passiv auf der Marsoberfläche verharrte und auf weiterführende Kommandos von der Erde wartete.
Der Grund für dieses Problem, so die Mitarbeiter des für die Steuerung des Rovers verantwortlichen Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien, liegt in der langjährigen Einsatzdauer des Bordcomputers, welcher seine ‚Garantiezeit‘ bereits deutlich überschritten hat. Durch das permanente Überschreiben von Dateien werden einzelne Bereiche des Flash-Speichers im Laufe der Zeit unbrauchbar. Dies wurde von den Ingenieuren und Technikern des JPL zwar nicht als bedrohlich eingestuft, sorgte aber trotzdem für gewisse Probleme, da diese Resets eine Unterbrechung der täglichen Arbeiten zur Folge haben, welche dann erst nach der Wiederinbetriebnahme des Rovers, was frühestens am folgenden Tag möglich ist, fortgesetzt werden können.
Da unter diesen Bedingungen – alleine im August erfolgten 12 dieser Resets – keine sinnvolle Weiterführung der Mission möglich war entschlossen sich die zuständigen Ingenieure des JPL in Absprache mit den Verantwortlichen der Mars Exploration Rover-Mission Ende August dazu, bei Opportunity eine Neuformatierung des Flash-Speichers durchzuführen. Bei diesem Vorgang werden sämtliche in diesem Speicher abgelegten Daten gelöscht. Zugleich werden die fehlerhaften Bereiche ‚identifiziert‘, als unbrauchbar markiert und anschließend in Zukunft nicht mehr genutzt.
Nach der Übertragung aller noch im Flash-Speicher abgelegten wissenschaftlichen Daten zur Erde wurden am 3. September weitere wichtige Konfigurationsdateien und Skripte vom Flash-Speicher in den EEPROM-Speicher – einen weiteren nichtflüchtigen Speicher des Computers – transferiert. Am nächsten Tag erfolgte dann die Neuformatierung des Flash-Speichers, wobei auch die fehlerhaften Bereiche erfolgreich identifiziert und ‚isoliert‘ werden konnten. Eine anschließende Analyse ergab, dass die Speicherkapazität des Flash-Speichers durch diesen Prozess um weniger als lediglich ein Prozent gesunken ist.
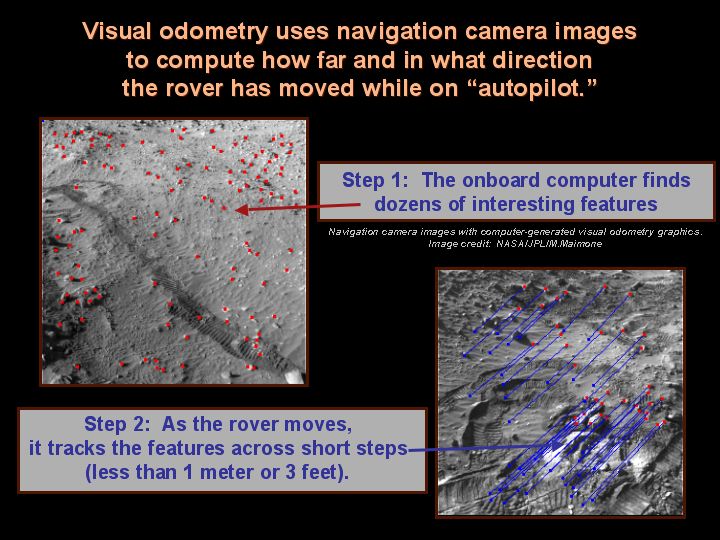
(Bild: NASA, JPL-Caltech, M. Maimone)
Am 6. September wurden die zuvor im EEPROM-Speicher abgelegten Dateien wieder in den Flashspeicher übertragen und weitere Dateien wurden am 7. September von dem Roverkontrollzentrum an Opportunity übermittelt. Eine anschließende Systemanalyse und die Auswertung der zwischenzeitlich gewonnenen Telemetriedaten zeigte, dass alle Vorgänge erfolgreich verlaufen waren und der Rover seine Arbeit somit fortsetzen konnte.
Weiterfahrt zum Ulysses-Krater
Nach der Anfertigung diverser Fotos, welche unter anderem der Dokumentation verschiedener in der unmittelbaren Umgebung gelegener Rippelmarken dienten, wurde eine erste Fahrt dann auch gleich für den 9. September, den Sol 3778 der Opportunity-Mission, angesetzt. Hierbei sollte der Rover eine als potentielles Hindernis eingestufte Gruppierung von größeren Gesteinsbrocken im Autonavigationsmodus mittels einer als ‚visuelle Odometrie‘ bezeichneten Methode selbstständig umfahren.
‚Autonavigationsmodus‘ bedeutet, dass der Rover seine Fahrt selbstständig durchführt, ohne dass die für die Steuerung des Rovers verantwortlichen Roverdriver hierfür im Vorfeld einen exakten Kurs festgelegt haben. In diesem Autonavigationsmodus unterbricht der Rover seine Fahrt in regelmäßigen Abständen und fertigt mit seinen Gefahrenerkennungs- und Navigationskameras Fotoaufnahmen des umliegenden Geländes an. Jeweils zwei Kameras bilden dabei zeitgleich den gleichen Geländeabschnitt ab.
Diese Aufnahmen werden von der ‚Drive-Software‘ des Rovers zu Stereoaufnahmen kombiniert – im Gegensatz zu konventionellen 2D-Aufnahmen ergibt sich bei stereoskopischen Aufnahmen auch ein räumlicher Eindruck der Landschaft – und anschließend autonom ausgewertet. Aus den so gewonnenen Informationen berechnet die Software des Rovers anschließend einen sicheren Weg für die Weiterfahrt.
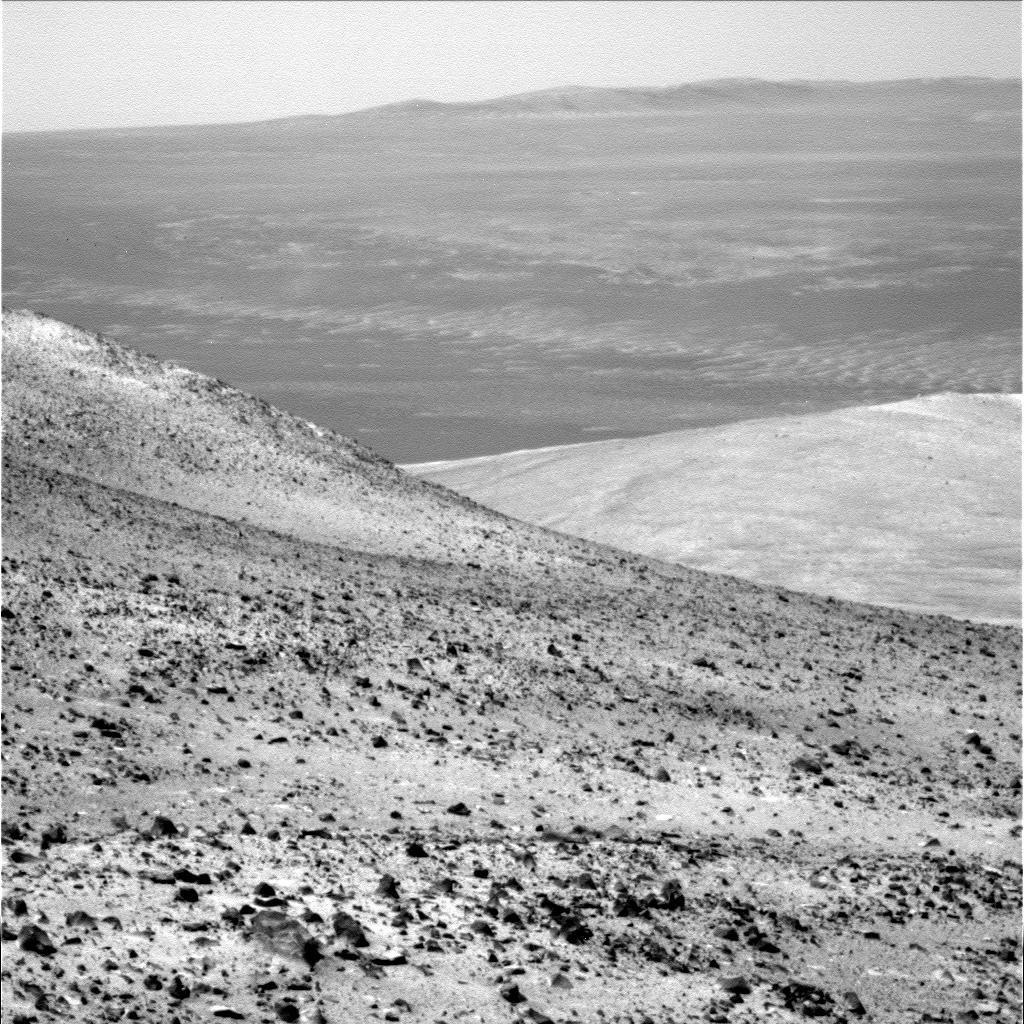
(Bild: NASA, JPL-Caltech, Cornell University)
Bei der visuellen Odometrie identifizieren die Kameras in einem ersten Schritt zunächst markante Oberflächenmerkmale in der näheren Umgebung. Nach einer erfolgten Fortbewegung über maximal einen Meter werden diese Punkte erneut ‚gesucht‘. Durch die zwischenzeitlich erfolgten relativen Veränderungen in den Entfernungen zueinander lässt sich der erfolgte Geländegewinn bis auf den Millimeter genau berechnen.
Die für den 9. September vorgesehene Fahrt fand jedoch nicht statt, da die Kameras des Rovers zur Berechnung des einzuschlagenden Kurses keine ausreichende Anzahl an markanten Oberflächenpunkten identifizieren konnten. Mit neu gesetzten Sicherheitsparametern konnte sich Opportunity jedoch zwei Tage später um 10,7 Meter in die west-südwestliche Richtung bewegen.
Im Rahmen von zwei weiteren Fahrten, bei denen am 14. und am 16. September insgesamt weitere 50 Meter zurückgelegt wurden, bewegte sich Opportunity am südlichen Rand der „Wdowiak Ridge“ auf einen mit dem Namen „Ulysses“ versehenen Impaktkrater zu. Bei der nächsten Fahrt am 18. September erfolgte dann eine weitere Annäherung an diesen etwa 30 Meter durchmessenden Krater.
Die aktuelle Situation
Gegenwärtig befindet sich Opportunity in einem guten Allgemeinzustand, der keinen Anlass für Sorgen bietet. Der Rover weist eine ‚gesunde‘ Energiebilanz auf, verfügt über einen stabilen Thermalhaushalt und kommuniziert sowohl ‚direkt‘ als auch über die als Relaisstationen eingesetzten NASA-Marsorbiter MRO und Mars Odyssey wie vorgesehen mit seinem Kontrollzentrum auf der Erde. Derzeit ist Opportunity damit beschäftigt, die Umgebung mit den verschiedenen Kamerasystemen eingehend abzubilden. Die nächste Fahrt ist für den heutigen Tag vorgesehen.
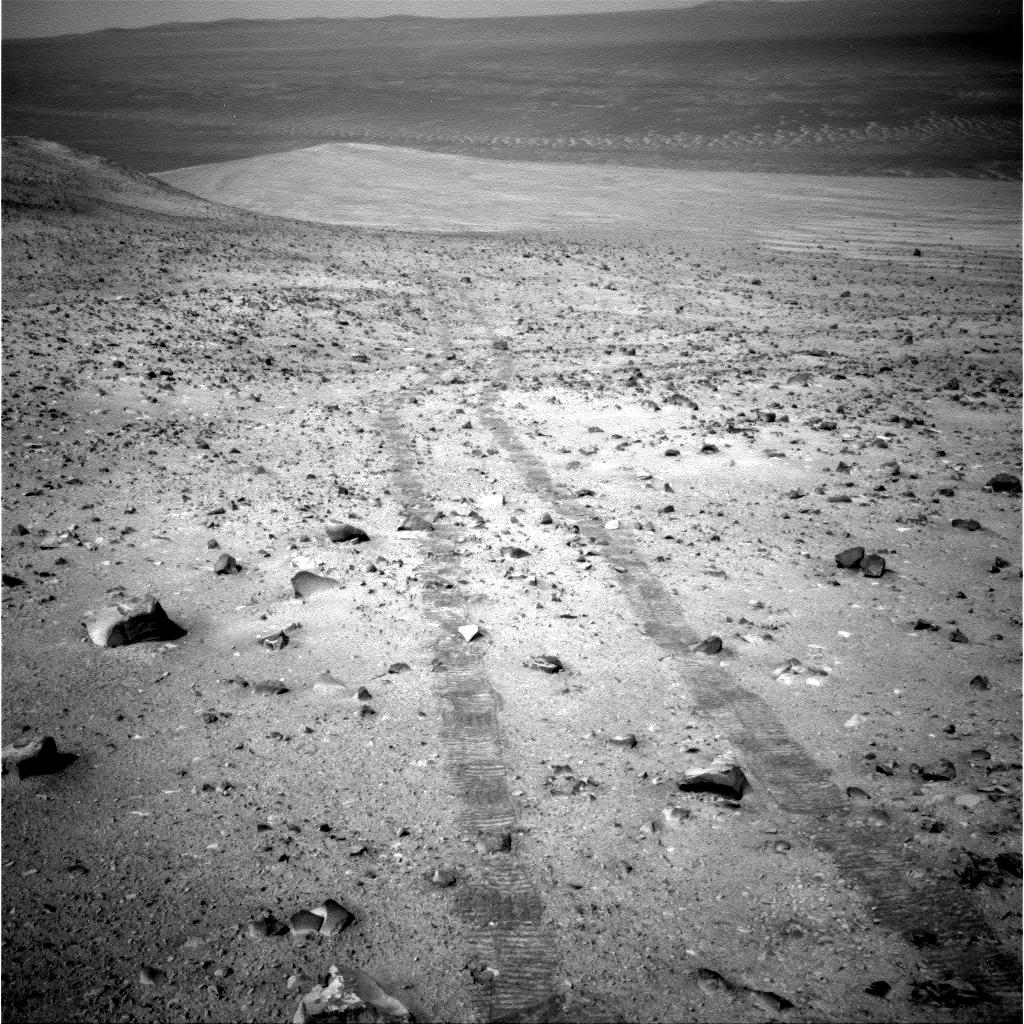
(Bild: NASA, JPL-Caltech)
Nach dem Verlassen des Randes des Ulysses-Kraters wird sich Opportunity auch weiterhin in die südliche Richtung bewegen. Bei dem dabei angepeilten ‚Fern-Ziel‘ handelt es sich um ein mit dem Namen „Marathon Valley“ belegtes Tal, welches sich im Bereich des „Cape Tribulation“ – einem Teilbereich des stark erodierten Kraterwalls, der den „Endeavour-Krater“ teilweise umgibt – befindet. Hier wurden in den vergangenen Jahren durch das CRISM-Spektrometer des MRO erhöhte Konzentrationen von verschiedenen Tonmineralen festgestellt, welche sich dort auf engen Raum zu befinden scheinen.
Außerdem sind auf den Aufnahmen der ebenfalls an Bord des MRO befindlichen HiRISE-Kamera an den Innenwänden dieses Tals verschiedene Gesteinsschichten erkennbar. Wie bei einer extrem verkleinerten Version der Steilwände des Grand Canyon im US-Bundesstaat Arizona ergibt sich hier für die Marsforscher eventuell auf kleinstem Raum ein Einblick in die langfristige klimatologische und geologische Geschichte dieser Region der Marsoberfläche.
Die Energiesituation
Neben dem allgemeinen technischen Zustand des Rovers muss bei der Opportunity-Mission allerdings auch immer ein Blick auf die aktuelle Energiesituation geworfen werden. Im Gegensatz zu dem zweiten derzeit aktiven Marsrover der NASA, dem durch einen Radioisotopengenerator mit Strom versorgten Rover Curiosity, ist der mit Solarpaneelen ausgestattete Rover Opportunity bezüglich seiner Energieversorgung ausschließlich auf die Sonne angewiesen. Hier ein Überblick über die Entwicklung der Energiewerte von Opportunity während der letzten Wochen.
Der Tau-Wert steht dabei für die Durchsetzung der Marsatmosphäre mit Staub und Wassereiskristallen. Je mehr Staub sich in der Atmosphäre des Planeten befindet, desto höher fällt dieser Wert aus. Der Wert für die Lichtdurchlässigkeit der Solarzellen gibt dagegen an, wie viel Sonnenlicht die Solarpaneele des Rovers trotz einer bedeckenden Staubschicht erreicht und letztendlich zur Energiegewinnung genutzt werden kann. Bei komplett staubfreien Paneelen würde dieser Wert 100 Prozent betragen. Je niedriger der Tau-Wert und je höher der Faktor für die Lichtdurchlässigkeit ausfällt, desto besser ist dies für den Energiehaushalt des ausschließlich mittels Sonnenenergie betriebenen Rovers.
- 10.09.2014: 0,694 kWh/Tag , Tau-Wert 0,879 , Lichtdurchlässigkeit 75,40 Prozent
- 02.09.2014: 0,713 kWh/Tag , Tau-Wert 0,852 , Lichtdurchlässigkeit 77,10 Prozent
- 26.08.2014: 0,680 kWh/Tag , Tau-Wert 0,858 , Lichtdurchlässigkeit 75,30 Prozent
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Während der letzten Tage lag der Tau-Wert in einem Bereich zwischen 0,82 und 0,90. Für den gestrigen Sol 3788 wurde ein Wert von 0,83 ermittelt. Sollten auf dem Mars in näherer Zukunft keine signifikanten Staubstürme auftreten, so wird der derzeitige Staubbedeckungsgrad und der damit verbundene Energiewert eine Fortsetzung der Aktivitäten des Rovers während der kommenden Monate deutlich begünstigen. Hierfür spricht auch die gegenwärtige Wettersituation auf dem Mars.
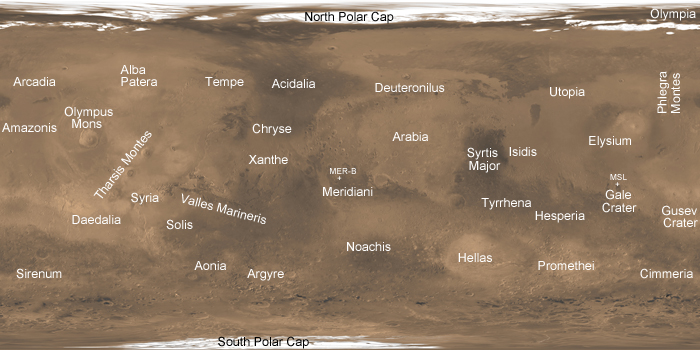
Die meisten der in den vergangenen Woche durch den Mars Reconnaissance Orbiter beobachteten Staubsturmgebiete waren über der nördlichen Hemisphäre über den Regionen Acidalia Planitia und Utopia Planitia aktiv. Lokal begrenzte Sturmgebiete traten zudem kurzfristig über den auf der Südhemisphäre gelegenen Gebieten Terra Sirenum, Noachis Terra und Hellas Planitia auf. Wolken aus Wassereiskristallen wurden speziell über den Vulkanen der Tharsis-Region registriert. Das Meridiani Planum – in diesem Gebiet ist Opportunity aktiv – war dagegen weitestgehend frei von Wolken oder Staubstürmen.
Bis zum heutigen Tag, dem Sol 3789 seiner Mission, hat der Rover Opportunity rund 40.750 Meter auf der Oberfläche des Mars zurückgelegt und dabei 196.664 Aufnahmen von der Oberfläche und der Atmosphäre des „Roten Planeten“ aufgenommen und an sein Kontrollzentrum am JPL übermittelt.
Diskutieren Sie mit im Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: