Mit einer Länge von 3,1 Metern, einer Breite von 2,7 Metern, einer Höhe von 2,1 Metern und einer Masse von 899 Kilogramm gleicht der Marsrover Curiosity in Bezug auf seine Abmessungen und sein Gewicht einem kompakt ausfallenden Personenkraftwagen. Er ist etwa doppelt so groß und fast fünfmal schwerer als seine beiden Vorgänger Spirit und Opportunity.
Ein Beitrag von Ralph-Mirko Richter
Inhalt
Das WEB
(Bild: NASA, JPL)
Der zentrale Bestandteil der Roverstruktur wird durch die sogenannte „Warm Electronics Box“ (kurz „WEB“) gebildet. Dieses aus einer Titanlegierung bestehende und zugleich wärmeisolierte Grundgehäuse garantiert die strukturelle Integrität Curiositys und schützt die verschiedenen in seinem Inneren befindlichen elektronischen Komponenten, zu denen unter anderem das Computersystem, die Elektronik der Funkanlage und verschiedene Analyseinstrumente gehören, vor den auf der Marsoberfläche herrschenden unwirtlichen Umweltbedingungen.
Das Temperaturmanagement
(Bild: NASA, JPL-Caltech)
Zum einen erfolgt dabei eine gewisse Abschirmung der Roverelektronik gegenüber der auf der Planetenoberfläche auftretenden Strahlenbelastung. Zum anderen dient die WEB aber auch dazu, die in ihrem Inneren angeordneten Bauteile gegen die während des Missionsverlaufes zu erwartenden tiefen Außentemperaturen und speziell gegen die dabei innerhalb eines Marstages auftretenden Temperaturschwankungen von über 100 Grad Celsius zu schützen. Abhängig von der jeweiligen Tages- und Jahreszeit werden die in der unmittelbaren Umgebung von Curiosity auftretenden Temperaturen in einem Bereich zwischen plus 30 Grad Celsius bis hin zu minus 127 Grad Celsius schwanken. Ohne weitere Schutzmaßnahmen würden sich diese Temperaturunterschiede wohl bereits innerhalb kürzester Zeit nicht nur für die Batterien des Rovers als absolut „tödlich“ herauskristallisieren.
Um diese innerhalb weniger Stunden auftretenden Temperaturunterschiede auszugleichen und die verschiedenen elektronischen Komponenten zu jedem Zeitpunkt der Mission auf einen möglichst optimalen Temperaturwert zu halten – angestrebt wird hierbei ein dauerhafter Wert von über minus 40 Grad Celsius -, befindet sich im Inneren der WEB ein ausgeklügeltes Leitungssystem, welches eine Gesamtlänge von fast 61 Metern aufweist. Durch die Leitungen dieses als „Heat Rejection and Recovery System“ (kurz „HRS“) bezeichneten Systems wird eine Flüssigkeit gepumpt, welche – vergleichbar mit dem Kühlsystem eines Personenkraftwagens – das Innere der WEB auf einer konstanten „Betriebstemperatur“ halten soll. Bei der hierfür eingesetzten Flüssigkeit handelt es sich um das Kältemittel CFC-11, auch bekannt unter der Bezeichnung Freon-11. Im Bedarfsfall wird das Freon dabei durch ein spezielles elektrisches Heizsystem erwärmt. Allerdings gestaltet sich diese Vorgehensweise einer aktiven Beheizung als relativ „energieintensiv“. Daher soll in erster Linie die aufgrund des natürlichen Zerfalls der im Inneren des Radioisotopengenerators befindlichen Plutoniumisotope freigesetzte Wärme dazu genutzt werden, um das Kühlmittel mit der nötigen Wärmeenergie zu versorgen.
Durch dieses Wärmekontrollsystem soll jedoch nicht nur eine Unterkühlung des Inneren der WEB verhindert werden. Zugleich ist das System auch dazu ausgelegt, um das Innere der Warm Electronics Box vor einer zeitweiligen, eventuell durch die Wärmeabgabe des MMRTG ausgelösten, auftretenden Überhitzung zu schützen und dabei überschüssige Wärmeenergie aus dem Inneren der WEB abzuleiten.
Die Energiequelle
Als Energiequelle dient Curiosity ein Radioisotopengenerator, ein sogenannter MMRTG. Dieser Generator, welcher über eine Abmessung von 67 x 64 Zentimetern verfügt, ist an der Rückseite des Rovers platziert.
Die Räder
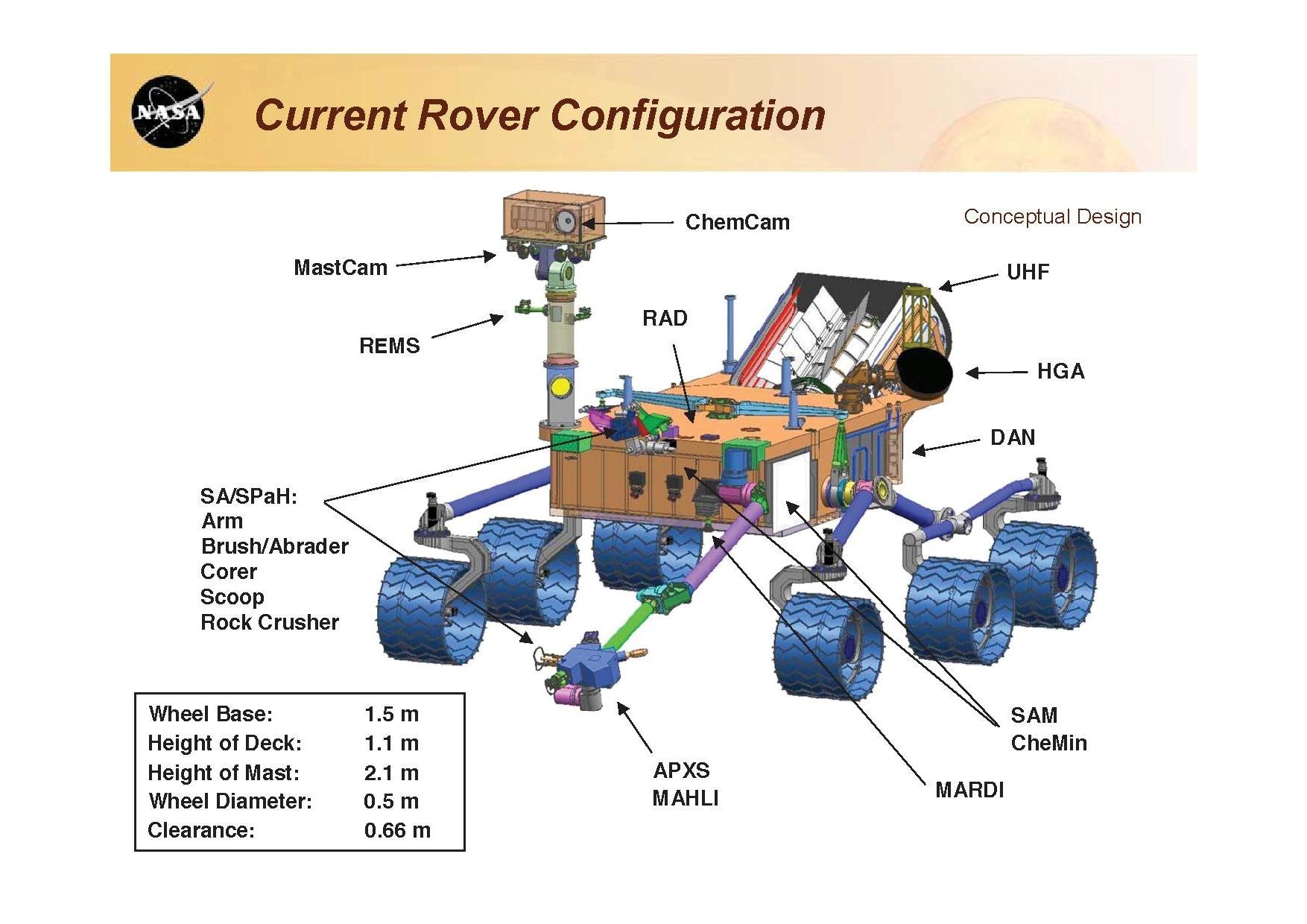
An den beiden Längsseiten der WEB befinden sich zwei Rohrgestänge, welche mittels einer durch den Schwerpunkt des Rovers verlaufende Achse miteinander verbunden sind. Diese Konstruktion bildet das Fahrgestell, das sogenannte „Rocker Bogie Suspension System“, an dem die Räder des Rovers befestigt sind. Aufgrund der Konstruktion des Fahrgestells und des Durchmessers der Räder – jedes der insgesamt sechs Räder weist einen Durchmesser von 51 Zentimetern auf – verfügt Curiosity auf einem ebenen Untergrund über eine Bodenfreiheit von 66 Zentimetern.
Das Rover Equipment Deck
Die Oberseite der WEB wird durch das „Rover Equipment Deck“ (kurz „RED“) gebildet, welches sich 1,1 Meter über der Planetenoberfläche befindet. Auf der Oberseite des RED sind verschiedene Instrumente – zum Beispiel der Strahlendetektor RAD – platziert. Des Weiteren befinden sich hier im hinteren Bereich die drei Antennen (HGA, LGA und UHF-Antenne), mittels derer Curiosity mit seinem Kontrollzentrum in Pasadena/Kalifornien kommuniziert. Außerdem sind auf dem RED verschiedene Kalibrierungsscheiben platziert, welche der Feinjustierung der verschiedenen Kamerasysteme und der Kalibrierung dienen.
Der Kameramast
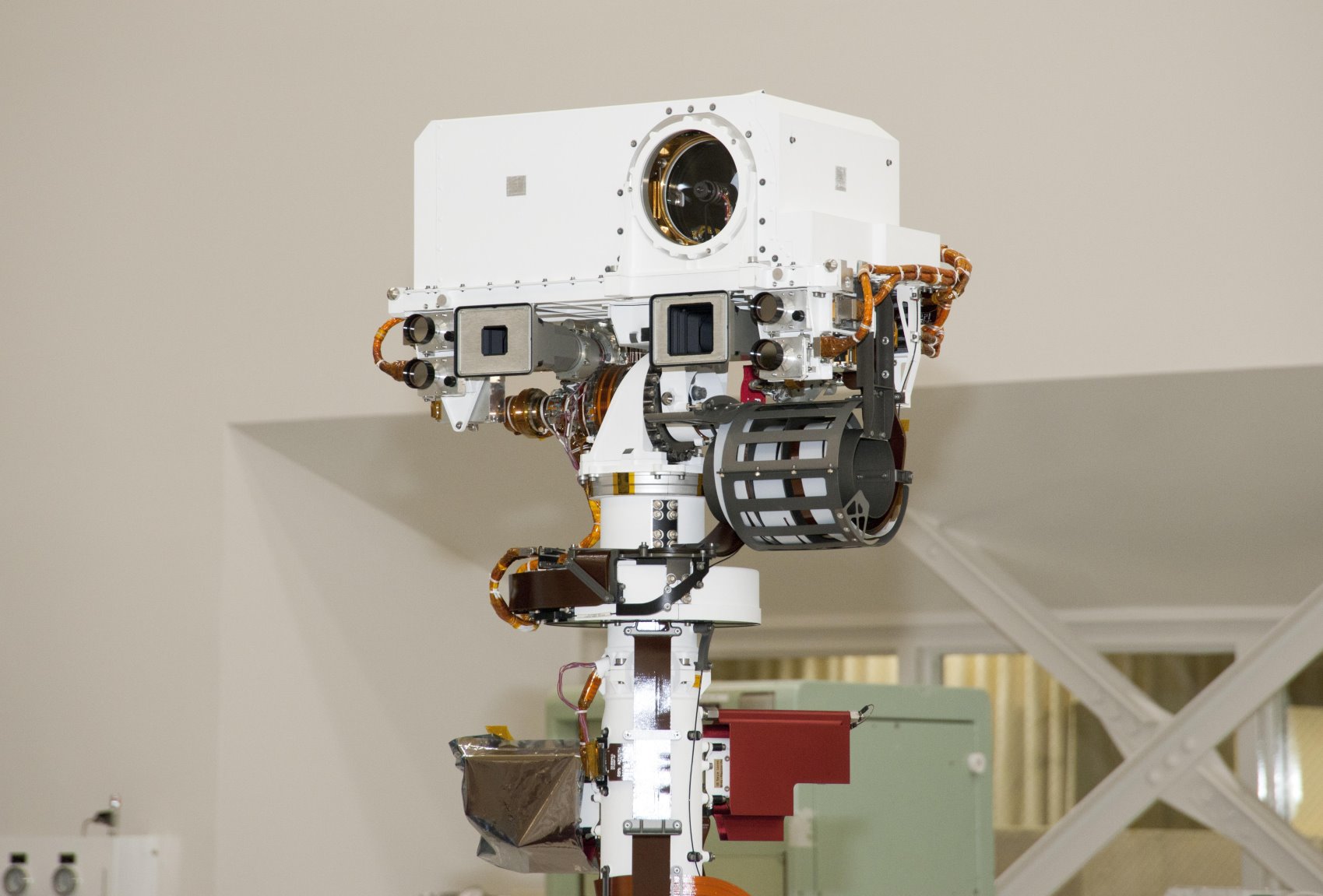
Im vorderen rechten Bereich des RED befindet sich der Kameramast (Fachbezeichnung „Remote Sensing Mast“) des Rovers, welcher erst nach der erfolgreichen Landung auf dem Mars entfaltet werden wird. Im Kopfteil dieses etwa einen Meter hohen Mastes sich zwei der wesentlichen wissenschaftlichen Instrumente des Rovers platziert.
An der Spitze des Mastes ist in der nebenstehenden Aufnahme die Öffnung der ChemCam erkennbar. Durch die kreisrunde Optik dieses Instruments wird ein Laserstrahl ausgesandt, mit dessen Hilfe die Zusammensetzung von Gesteinen ermittelt werden kann, welche sich dabei bis zu sieben Meter von dem Rover entfernt befinden. Auf diese Weise ist eine „Fernuntersuchung“ potentieller Forschungsziele möglich. Auch aufgrund der Resultate dieser Untersuchungen wird anschließend von den an der Mission beteiligten Wissenschaftlern entschieden, ob ein potentiell interessantes Ziel einer näheren Untersuchung unterzogen werden soll.
Unterhalb der ChemCam sind zwei viereckige Öffnungen sichtbar, bei denen es sich um die beiden Objektive der MastCamera handelt. Diese aus zwei Einzelinstrumenten bestehenden „MastCam“ bildet die Hauptkamera des Rovers. Mittels verschiedener Farbfilter kann dieses Kamerasystem die Umgebung nicht nur in einer hohen bildlichen Auflösung, sondern zudem auch in Echtfarben darstellen. Durch die Verwendung verschiedener Farbfilter kann die Kamera dabei auch sogenannte „Falschfarbenaufnahmen“ erzeugen, durch denen Auswertung sich Rückschlüsse auf die chemische und mineralogische Zusammensetzung der abgebildeten Objekte ziehen lassen.
Bei den vier runden Öffnungen rechts und links der MastCam-Objektive handelt es sich um die Optiken der sogenannten Navigationskameras. Mit Hilfe dieser vier identischen „NavCams“ kann die Umgebung des Rovers mit einer Auflösung von jeweils 1024 x 1024 Pixeln aufgezeichnet werden. Die Optiken dieser Kameras weisen eine Brennweite von 15 Millimetern auf und können die Umgebung mit einem Sichtfeld von 45 Grad aus einer Distanz von mindestens 50 Zentimetern erfolgreich abbilden. Die so erstellten Aufnahmen werden von der für die Fortbewegung des Rover zuständigen, zum Großteil autonom arbeitenden „Drive-Software“ für die Erstellung der weiteren Fahrtroute verwendet. Zu diesem Zweck können die zeitgleich von jeweils einer rechts und einer links platzierten NavCam angefertigten Aufnahmen zu Stereoaufnahmen kombiniert werden, um das vorausliegende Gelände in 3D darzustellen.
Weiter unten am Mast sind die Sensoren der „Rover Environmental Monitoring Station“ (REMS) platziert. Hierbei handelt es sich um eine Wetterstation, welche verschiedene Parameter des aktuellen Wettergeschehens (Windgeschwindigkeiten und -richtungen, Temperatur, Luftdruck und Luftfeuchtigkeit) aufzeichnen.
Der Instrumentenarm

(Bild: NASA, JPL-Caltech)
An der Vorderseite des Rovers befindet sich ein Roboterarm, an dessen Spitze zwei weitere Instrumente und verschiedene der Probenuntersuchung und -aufbereitung dienende Hilfsinstrumente befestigt sind. Dieser als „Sample Acquisition, Processing, and Handling“ (kurz „SA/SPaH“) bezeichnete Arm verfügt über eine ähnliche Bewegungsfreiheit wie ein aus Schulter-, Ellbogen- und Handgelenk bestehender menschlicher Arm. Curiositys aus einer Titanlegierung angefertigte Roboterarm verfügt dabei über zwei Gelenke in der „Schulter“, ein Gelenk im „Ellbogen“ und nochmals zwei Gelenke im „Handgelenk“. Jedes dieser fünf Gelenke wird durch einen eigenständigen, kältetoleranten Aktuator gesteuert. Im voll ausgestreckten Zustand erreicht der eigentliche Roboterarm eine Länge von 1,9 Metern.
Am Ende des Roboterarms ist ein fast 60 Zentimeter durchmessender und rund 33 Kilogramm schwerer, drehbarer Aufbau befestigt. Die beiden darin untergebrachten Instrumente, das APXS-Spektrometer und das Mikroskop des Rovers, können somit Oberflächenziele analysieren, welche bis zu maximal 2,2 Meter von der Vorderseite Curiositys entfernt sind. Zusätzlich sind in diesem Kopfstück drei weitere Hilfsgeräte platziert, welche ebenfalls der Untersuchung der Marsoberfläche dienen. Es handelt sich hierbei um einen Gesteinsbohrer, eine Bürste und um das so genannte „Collection and Handling for Interior Martian Rock Analysis“-System (kurz „CHIMRA“). Das CHIMRA setzt sich aus einer kleinen Baggerschaufel, mehreren Sieben und verschiedenen Auffangbehältern zusammen. Die durch das CHIMRA gesammelten Proben der Marsoberfläche werden im Bedarfsfall von dort zu zwei in der Warm Electronics Box angeordnete Instrumenten, es handelt sich um SAM und CheMin, geleitet und von diesen näher analysiert.
Um eine erfolgreiche Platzierung der verschiedenen Instrumente auf der Marsoberfläche zu gewährleisten, muss der Roboterarm trotz seiner Länge und des an seinem Ende lastenden Gewichtes in der Lage sein, millimetergenaue Bewegungen auszuführen. Brett Kennedy, einer der an der Curiosity-Mission beteiligten Ingenieure des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien, erläutert diese Herausforderung folgendermaßen: „Dieser Arm muss präzise genug arbeiten können, um eine Aspirin-Tablette in einem Fingerhut zu platzieren.“
Die HazCams
An den vier Ecken der WEB ist jeweils eine so genannte „Hazard Avoidance Camera“ (kurz „HazCam“) platziert. Diese „Gefahrenerkennungskameras“ versorgen den Rover mit Informationen über die Gestalt und Formation des unmittelbar vor und hinter dem Rover liegenden Geländes. Jede dieser vier Kameras ist mit einem Fisheye-Objektiv ausgestattet und bildet die Umgebung bei einer fest eingestellten Brennweite von 5,58 Millimetern mit einem Sichtfeld von 120 x 120 Grad in Form von Schwarz-Weiß-Aufnahmen ab. Aus den durch die rechte und linke vordere beziehungsweise hintere HazCam angefertigte Aufnahmen generiert eine spezielle Software 3D-Aufnahmen des unmittelbar vorausliegenden Geländes. Diese 3D-Bilder werden von der Navigationssoftware des Rovers – parallel zu den auf vergleichbare Weise erstellten Aufnahmen der Navigationskameras – dazu genutzt, um eventuell auftretenden Geländehindernissen bei der weiteren Fahrt selbstständig auszuweichen. Die Auflösung der HazCams ist ausreichend, um das umliegende Gelände zu diesem Zweck bis zu einer Entfernung von bis zu drei Metern ausreichend aufzulösen.
Diskussion zu diesem Artikel