Neben einem Gesteinshammer ist die Handlupe das wohl am häufigsten von Geologen bei ihren Feldforschungsarbeiten eingesetzte Arbeitsmittel. Mit diesem handlichen Instrument können die Geologen eine erste Vor-Ort-Untersuchung der zu analysierenden Gesteine vornehmen und dabei zugleich deren Zusammensetzung grob beschreiben. Auch Curiosity, der neueste Marsrover der US-amerikanischen Weltraumbehörde NASA, führt das Äquivalent einer solchen Lupe mit sich.
Ein Beitrag von Ralph-Mirko Richter
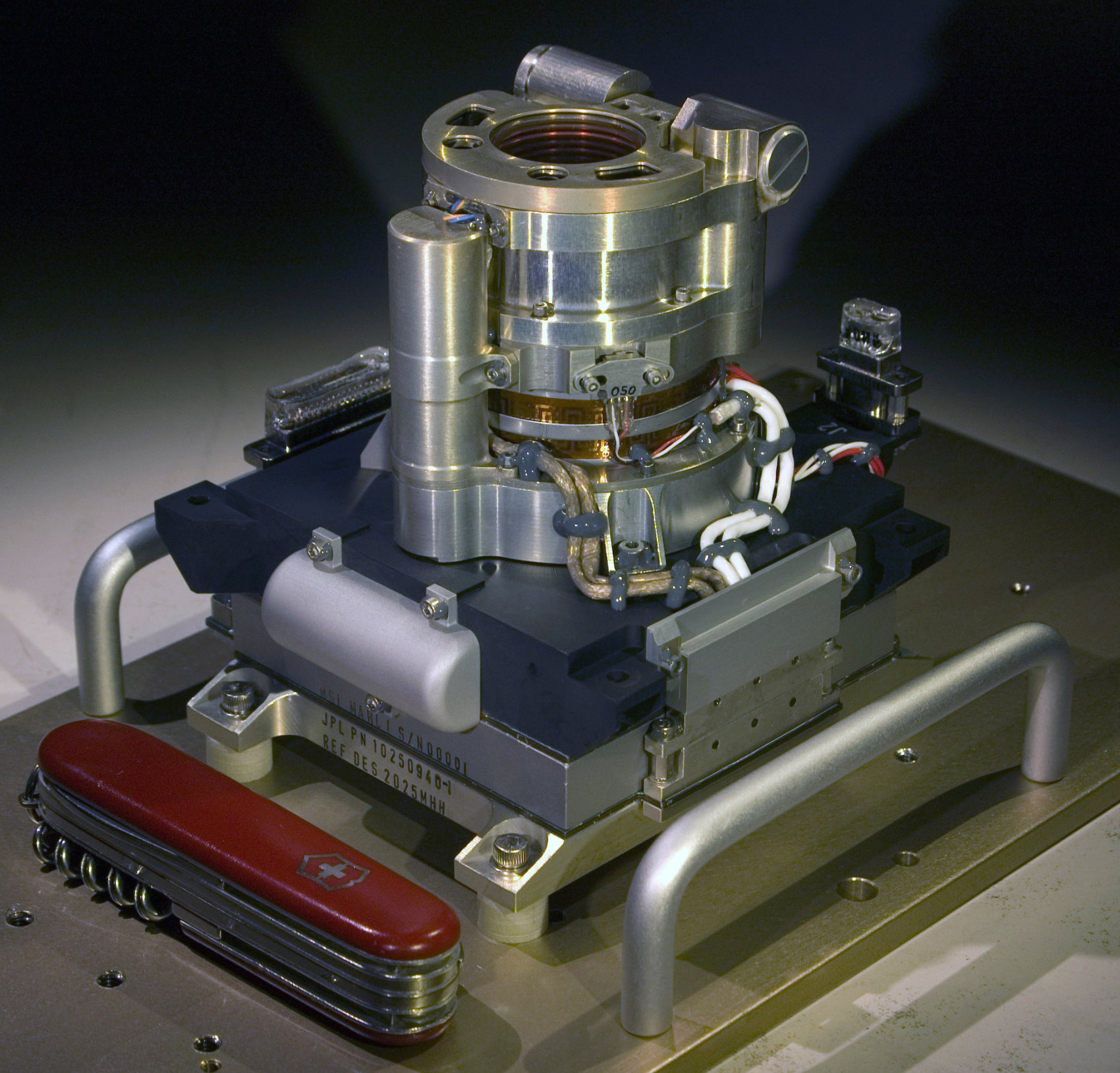
(Bild: NASA, JPL, Malin Space Science Systems)
Für die detaillierte optische Untersuchung der Marsoberfläche und deren erste Charakterisierung wurde der Marsrover Curiosity mit dem „Mars Hand Lens Imager“ (kurz „MAHLI“) ausgestattet. Bei dem MAHLI handelt es sich um eine hochaufösende Kamera, welche am vorderen Ende des Instrumentenarmes montiert ist. Das Instrument soll in erster Linie als eine Art Mikroskop für die optische Untersuchung sehr feiner Strukturen auf der Marsoberfläche eingesetzt werden und die dort befindlichen Gesteine, Sand- und Staubkörner und eventuelle Frostablagerungen aus unmittelbarer Nähe abbilden. Dabei soll der MAHLI die anschließend von den weiteren Instrumenten des Rovers näher zu untersuchenden Bodenproben in einen geochemischen, lithologischen und mineralogischen Zusammenhang setzen.
Zu diesem Zweck ist der MAHLI mit einem 1.600 x 1.200 Pixel großen Bayer-Sensor ausgestattet, welcher die Oberfläche in hoher Auflösung und in Farbe abbilden kann. Damit erreicht das Instrument eine Auflösung, welche der Qualität einer handelsüblichen 2-Megapixel-Farbkamera entspricht. Die MAHLI-Kamera verfügt dabei über eine in mehreren Stufen verstellbare Brennweite, welche in einem Bereich zwischen 22,5 Millimetern und „Unendlich“ fokussieren kann. Speziell bei der Verwendung einer großen Brennweite kann der MAHLI die Oberfläche auch dann abbilden, wenn sich der Roboteram nicht unmittelbar über der Marsoberfläche befindet. Die dabei erreichbare relativ geringe Auflösung kann durch das sich dabei ergebende größere Gesichtsfeld ausgeglichen werden.
Bei der minimalsten möglichen Annäherung an ein abzubildendes Objekt kann der MAHLI aus einer Entfernung von etwa 25 Millimetern zum abzubildenden Ziel Strukturen mit einer Größe von 13,9 Mikrometern pro Pixel auflösen. Dabei kann mit einer einzigen Aufnahme ein Oberflächenbereich mit den Abmessungen von 18 x 24 Millimetern wiedergeben werden. Um zu verhindern, dass der MAHLI versehentlich näher als diese 25 Millimeter an die Oberfläche herangeführt wird – dies könnte im schlimmsten Fall zu einer Beschädigung des Kamera-Objektives führen – ist das Instrument mit zwei Kontaktsensoren ausgestattet. Sobald die Sensoren einen „Bodenkontakt“ melden, stoppt der Roboterarm automatisch die weitere Annäherung des MAHLI an die Oberfläche.
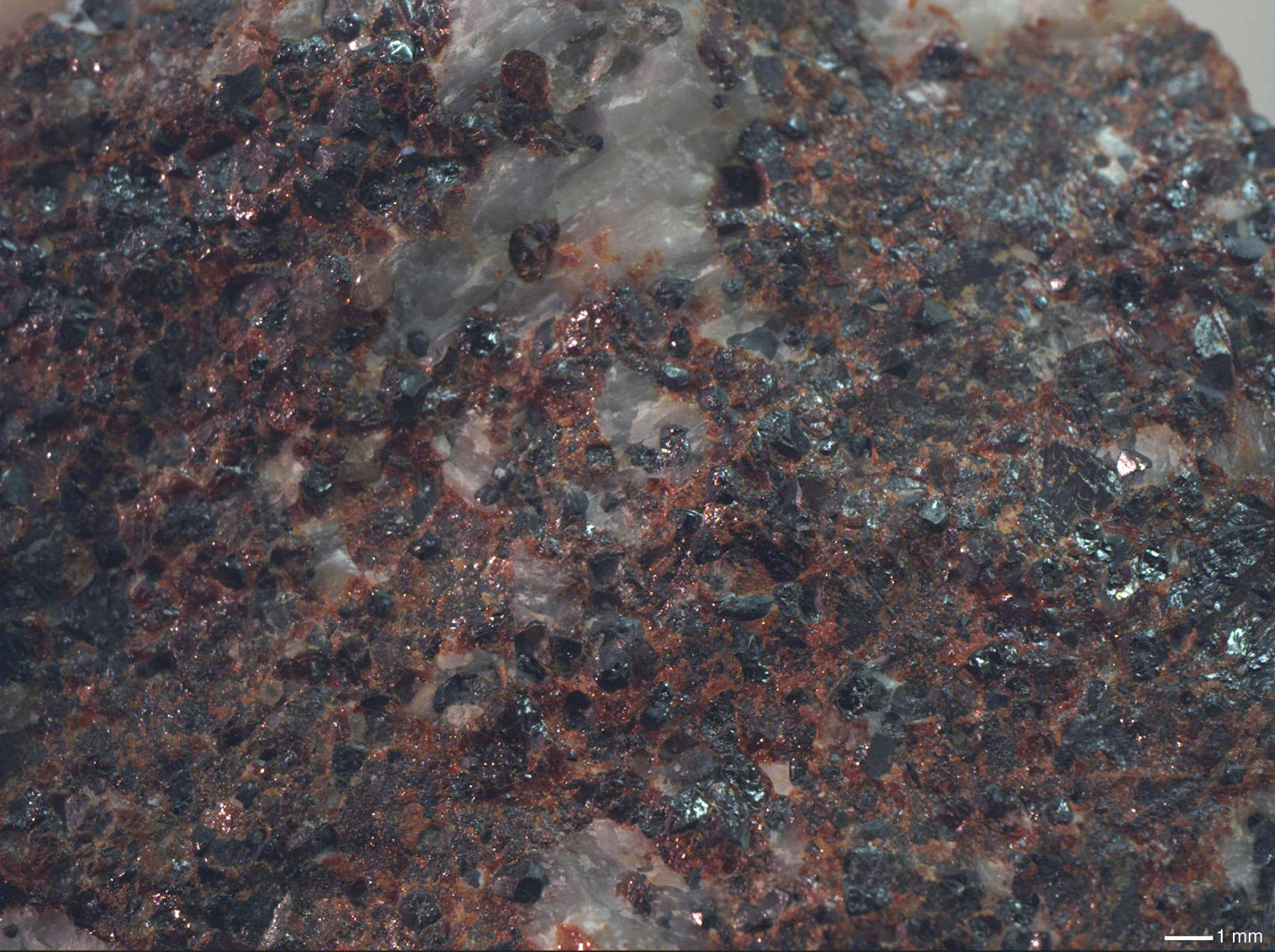
(Bild: NASA, JPL, Malin Space Science Systems)
Bei einer Entfernung von 50 Millimetern zum angepeilten Ziel sinkt die erreichte Auflösung auf dann immer noch 24,5 Mikrometer pro Pixel. Aus einer Entfernung von 66 Millimetern – dies entspricht der Entfernung, in welcher die beiden Mikroskope der Marsrover Spirit und Opportunity operieren, werden Strukturen mit einer Größe von 31 Mikrometern pro Pixel wiedergegeben.
Dieser Wert ist identisch mit der aus der gleichen Entfernung erreichbaren Auflösung der Mars Exploration Rover-Mikroskope. Allerdings deckt der MARDI dabei pro Aufnahme ein größeres Gesichtsfeld ab und liefert zudem Farbbilder des zu untersuchenden Untergrundes (die Mikroskope von Spirit und Opportunity liefern lediglich Schwarz-Weiß-Bilder). Eine weitere Verbesserung im Vergleich zu dem zuvor auf dem Mars verwendeten Mikroskopen besteht in der Möglichkeit, den gleichen Oberflächenbereich unter der Verwendung verschiedener Fokallängen abzubilden ud dabei mittels der Fokusvariationen eine größere Schärfentiefe und zusätzliche 3D-Informationen des abgebildeten Bereiches zu erhalten. Stereoskopische Aufnahmen können dagegen durch einen leichten seitlichen Versatz des MAHLI zwischen zwei Aufnahmen des gleichen Zieles bei einer identischen Fokuseinstellung erzeugt werden.

(Bild: NASA, JPL, Malin Space Science Systems)
Zwecks einer optimalen Ausleuchtung der potentiellen Beobachtungsziele, welche zum geplanten Aufnahmezeitpunkt eventuell im Schatten liegen können, ist der MAHLI mit vier Weißlicht-LEDs ausgestattet, welche sich direkt am Gehäuse der Kamera befinden. Jedes der beiden Weißlicht-LED-Sets kann dabei unabhängig von dem anderen Set aktiviert oder deaktiviert werden. Dank dieser vier LEDs kann MAHLI theoretisch auch während der Marsnächte aktiviert werden und Aufnahmen des Bodens anfertigen. Hierbei wird der Einsatz allerdings durch die während der Nächte vorherrschenden tiefen Temperaturen und die im Einzelfall gegebene Energiesituation des Rovers stark limitiert.
Die verschiedenen optischen und mechanischen Komponenten des MARDI sind lediglich dazu ausgelegt, um bei Umgebungstemperaturen oberhalb von minus 70 Grad Celsius zu arbeiten. Optimalerweise sollten die Temperaturen jedoch nicht tiefer als minus 50 Grad Celsius liegen. Im Bedarfsfall kann das Instrument jedoch mittels verschiedener Heizelemente gewärmt und so auch bei tieferen Außentemperaturen aktiviert werden. Der vorgesehene Einsatz der Kamera während der Marsnächte soll dabei speziell der Untersuchung von eventuell auftretenden Frostablagerungen und der Dokumentation von deren Veränderungen dienen.
Zusätzlich sind außerdem noch zwei UV-LEDs vorhanden, welche im Wellenbereich von 365 Nanometern arbeiten. Diese beiden UV-LEDs werden in erster Linie der Suche nach fluoreszierenden Mineralien und deren Abbildung dienen. Ihr Einsatz ist ausschließlich während der Marsnächte vorgesehen.
(Bild: NASA, JPL, Malin Space Science Systems)
Um zu vermeiden, dass die Linse des MAHLI während der Operationsdauer von Curiosity mit Staubablagerungen verunreinigt wird, befindet sich vor dieser Linse eine Schutzabdeckung, welche während der zu erstellenden Aufnahmen normalerweise entfernt wird. Dieses Entfernen der Abdeckung ist allerdings nicht zwingend notwendig, da die Abdeckung transparent ist und Aufnahmen somit theoretisch auch bei einer „vorgeschalteten“ Abdeckung angefertigt werden können.
Für die Anfertigung einer einzelnen Aufnahme benötigt der MARDI typischerweise einen Zeitraum zwischen 5 und 15 Millisekunden. Bei der Verwendung der Weißlicht-LEDs erhöht sich dieser Zeitraum aufgrund der dafür benötigten Belichtungszeit auf etwa 80 Millisekunden. Unter der Verwendung der UV-LEDs werden dagegen für die Anfertigung eines Einzelbildes bis zu zwei Sekunden benötigt. Für die Zwischenspeicherung der angefertigten Aufnahmen vefügt der MARDI über eine im Inneren der Warm Electronics Box (WEB) des Rovers befindliche Elektronikeinheit, welche über einen eigenen Flash-Speicher mit einer Kapazität von acht GB verfügt.
Die angefertigten Aufnahmen werden dort normalerweise im JPEG-Format abgelegt und anschließend zuerst in einer minimierten Auflösung an das Rover-Kontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Wie auch bei den Aufnahme den beiden anderen optischen Kameras des Rovers, der MastCam und der MARDI, wird erst nach der Begutachtung dieser „Thumbnail Images“ von den an der Mission beteiligten Wissenschaftlern entschieden, welche höher aufgelösten Bilder der MARDI in der Folgezeit mit welcher Priorität übertragen werden.
Für die Entwicklung und den Bau der MAHLI-Kamera war die auch für die Mast-Kamera und die MARDI-Kamera zuständige, in San Diego/Kalifonien ansässige Firma Malin Space Science Systems (MSSS) verantwortlich. Der für das Instrument hauptverantwortliche Wissenschaftler ist Dr. Kenneth S. Edgett von der Firma MSSS.
Für die Kalibrierung der Kamera auf dem Mars ist zusätzlich neben den dafür üblichen Farb- und Musterpaletten auch ein Penny aus dem Jahre 1909 an der Vorderseite des Rover-Gehäuses angebracht.