Eine an der Unterseite des nächsten Marsrovers Curiosity montierte Kamera wird dessen Landung in HD-Qualtität aufnehmen. Ein aus den Aufnahmen zusammengestelltes Video wird es dann erstmals erlauben, eine Landung auf dem Mars in echten Bildern mitzuerleben.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, Malin Space Science Systems. Vertont von Peter Rittinger.
(Bild: NASA, JPL-Caltech)
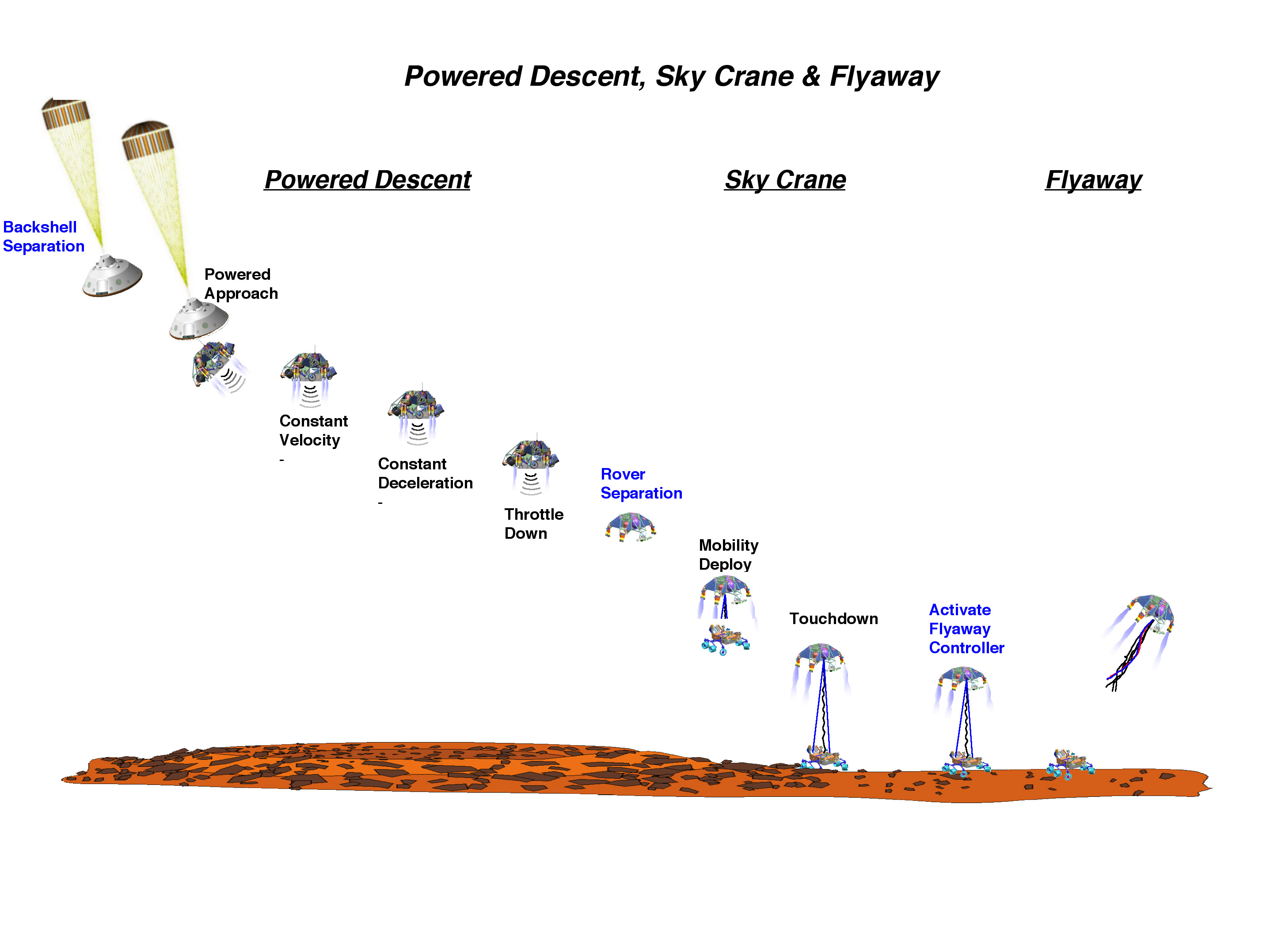
Der nächste Marsrover, der von der amerikanischen Weltraumbehörde NASA betriebene Rover Curiosity, wird nach dem derzeitigen Planungsstand Ende 2011 starten und unseren Nachbarplaneten im August 2012 erreichen (Raumfahrer.net berichtete). Anschließend tritt die Abstiegsstufe von Curiosity mit einer Geschwindigkeit von etwa 55.000 Kilometern pro Stunde in die Marsatmosphäre ein und wird durch die dabei entstehende Reibung abgebremst. Im Verlauf dieser Phase wird der Hitzeschild auf eine Temperatur von 1.500 Grad Celsius erhitzt werden. Etwa 270 Sekunden nach dem Eintritt in die Atmosphäre wird der Hitzeschild abgesprengt. Anschließend öffnet sich ein Fallschirm, welcher die Abstiegsstufe auf Unterschallgeschwindigkeit abbremst. In einer Höhe von etwa 1.500 Metern über der Marsoberfläche wird dann auch der Fallschirm abgetrennt und die acht Bremsraketen des sogenannten Skycrane werden aktiviert.
Nach dem Abbau der Landegeschwindigkeit auf einen Wert von „Null“ schwebt der Skycrane schließlich in einer Höhe von wenigen Metern über der Planetenoberfläche. In einem Zeitraum von etwa acht Sekunden wird Curiosity an mehreren Seilen hängend auf die Oberfläche herab gelassen. Nachdem der Rover dem Skycrane den erfolgten Bodenkontakt übermittelt hat, werden die Seile gekappt. Der Skycrane entfernt sich daraufhin in einem Winkel von etwa 45 Grad vom Landeplatz und schlägt in einer Entfernung von mehreren hundert Metern hart auf der Marsoberfläche auf.
Für dieses Landemanöver wird Curiosity von der NASA mit einer speziellen Kamera, dem „Mars Descent Imager“ oder kurz MARDI, ausgerüstet, welche den Landeanflug dokumentieren soll. Hierzu beginnt die an der Unterseite des Rovers befestigte Kamera etwa zwei Minuten vor dem Aufsetzen auf der Oberfläche des Mars damit, pro Sekunde vier Farbbilder aufzunehmen. MARDI ist mit einem CCD-Chip mit 1600 x 1200 Pixeln ausgestattet und liefert damit eine vergleichbare Bildauflösung wie das Full-HD-Fernsehen.
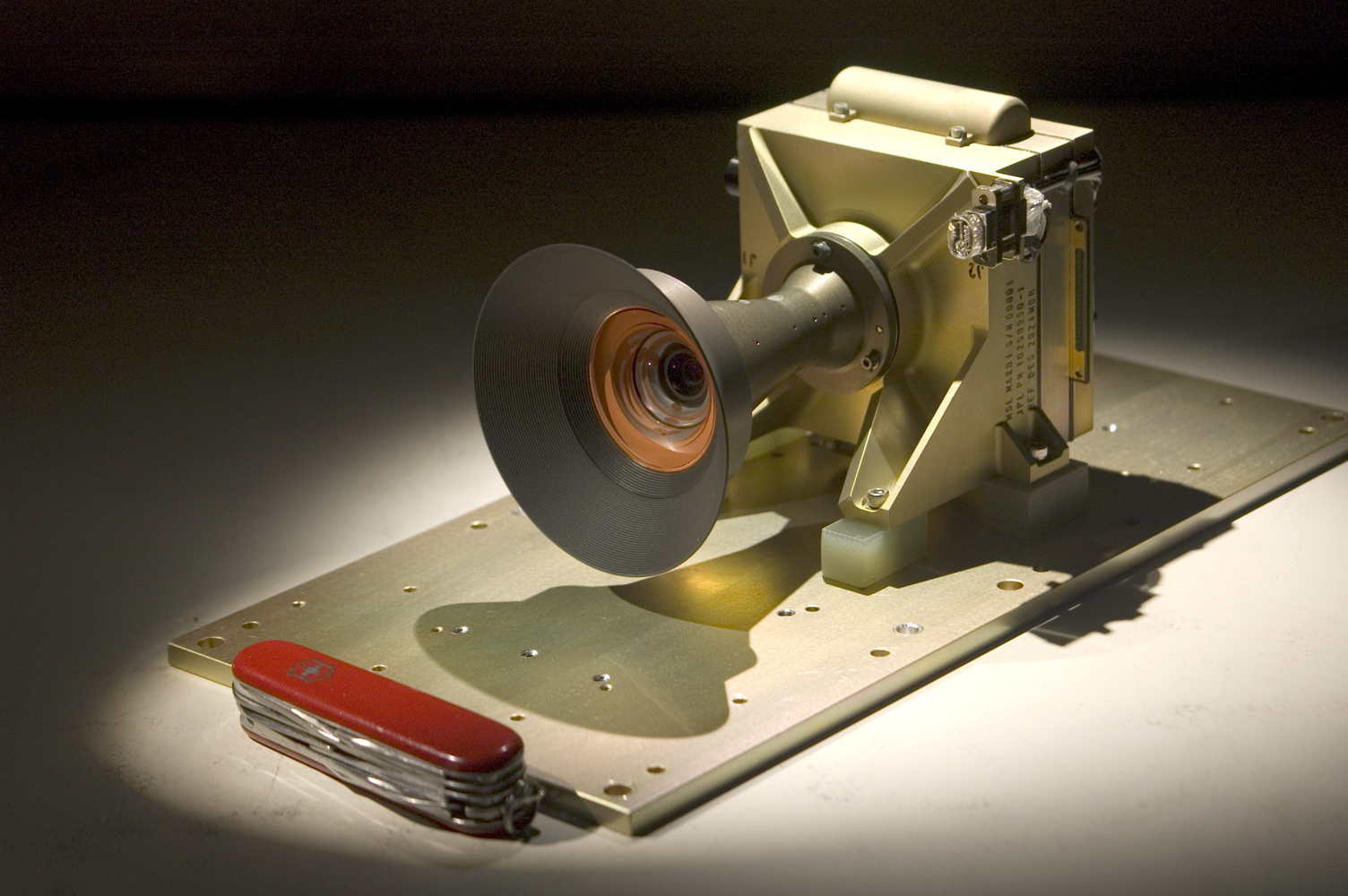
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Die ersten Bilder der Kamera werden den abgesprengten Hitzeschild zeigen, welcher den Rover während des Eintritts in die Marsatmosphäre vor der Reibungshitze schützte. Anschließend kommt das angepeilte Landegebiet in Sicht. Auf den ersten Aufnahmen wird man dabei noch eine Fläche mit einer Ausdehnung von mehreren Quadratkilometern überblicken können. Die während des Abstiegs zur Planetenoberfläche aufgenommenen Bilder werden zeigen, dass der Landeanflug nicht ruhig verlaufen wird. Vielmehr wird Curiosity wahrscheinlich zuerst rotieren und später hin und her pendeln, während er sich, erst an seinem Fallschirm schwebend und anschließend durch seine Bremsraketen abgebremst, der Oberfläche immer weiter nähert. Trotz einer Belichtungszeit von lediglich 1,3 Millisekunden werden daher vermutlich viele der Aufnahmen „verwackeln“.
Kurz vor dem Aufsetzen auf der Marsoberfläche wird Curiosity seine sechs Räder ausfahren. Während dieses Manövers wird das linke Vorderrad des Rovers in den Aufnahmebereich der MARDI-Kamera gelangen. Auf den Bildern wird auch der Schatten von Curiosity zu erkennen sein, welcher sich zunächst nur als winziger Punkt und dann immer größer werdend westlich des Rovers über die Oberfläche bewegt. Beim Aufsetzen werden Schatten und Rover schließlich miteinander verschmelzen und die Kamera zeigt nur noch einen handtuchgroßen Ausschnitt der Marsoberfläche direkt unterhalb von Curiosity. Möglicherweise ziehen dabei auch noch einige Staubschwaden durch das Bild, welche zuvor von den Bremsraketen aufgewirbelt wurden.
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Allerdings wird die interessierte Öffentlichkeit diese Bilder leider nicht live mitverfolgen können, denn die Aufnahmen werden erst nach der erfolgreichen Landung des Rovers an sein Kontrollzentrum am Jet Propulsion Laboratory (JPL) in Pasadena/USA übermittelt. Der Grund hierfür ist die zu geringe Datenübertragungsrate während der Landephase. Die begrenzten Kommunikations-Kapazitäten sollen vielmehr zur Übermittlung von Telemetriedaten genutzt werden, durch welche die Techniker und Ingenieure des JPL Einzelheiten über den Zustand des Rovers während des Abstiegsphase erfahren. Daher werden alle von der Kamera aufgenommenen Bilder zuerst in einem internen RAM-Speicher abgelegt und erst anschließend, abhängig von der Priorität der einzelnen MARDI-Aufnahmen, im Rahmen mehrerer Übertragungen an das Kontrollzentrum übermittelt.
„Wir werden die Bilder in mehreren Abschnitten erhalten“, so Michael C. Malin von der Firma Malin Space Science Systems, welche die MARDI-Kamera entwickelt und gefertigt hat. „Zuerst werden wir dabei nur verkleinerte Versionen der Abstiegsbilder erhalten und nur einige Bilder werden über die volle Auflösung verfügen.“ Diese „Full Frame“-Aufnahmen werden dabei in erster Linie an das Kontrollzentrum übermittelt, um die Qualität der MARDI-Aufnahmen beurteilen zu können. Die verkleinerten Bilder verfügen dagegen lediglich über eine Auflösung von 200 x 150 Pixeln.
Nachfolgende Übertragungen werden dann weitere voll aufgelöste Aufnahmen beinhalten, welche mit Hilfe der zuerst übertragenen verkleinerten Bildversionen gezielt ausgesucht werden. Bereits aus den verkleinerten Aufnahmen wird man allerdings ein Video erstellen können, welches in seiner Qualität mit einem „YouTube“-Video vergleichbar sein wird. Die endgültige HD-Version des Videos wird dagegen erst verfügbar sein, nachdem alle MARDI-Aufnahmen an das Kontrollzentrum übermittelt wurden. Abhängig von der Priorität anderer Daten kann deren Übertragung allerdings mehrere Wochen oder sogar Monate andauern.
(Bild: Malin Space Science Systems)
Allerdings wird die MARDI-Kamera nicht alleine aus PR-Gründen ein Bestandteil der Curiosity-Mission sein, sondern sie erfüllt in erster Linie wissenschaftliche Aufgaben. Durch die Aufnahmen während des Landeanfluges kann das Landegebiet von Curiosity von Anfang an mit einer sehr hoher Auflösung erfasst werden, wodurch man wertvolle geologische und topografische Informationen über das Landegebiet und dessen unmittelbare Umgebung gewinnen wird.
Die an der Mission beteiligten Wissenschaftler können somit umgehend mit der Auswahl interessanter Forschungsobjekte auf der Oberfläche beginnen, zu denen der Rover dann gelenkt werden kann. Hunderte der während des Landeanfluges aufgenommenen Bilder werden bereits kurz nach dem Beginn der Aufnahmesequenz Oberflächenstrukturen zeigen, die zu klein sind, um sie auf Aufnahmen zu erkennen, welche aus dem Marsorbit heraus aufgenommen wurden.
„Jedes der 10 wissenschaftlichen Instrumente des Rovers spielt eine wichtige Rolle für den Erfolg der Mission“, so John Grotzinger vom California Institute of Technology in Pasadena/USA, der wissenschaftliche Leiter der Curiosity-Mission. „MARDI gibt uns dabei einen Überblick über das Gelände rund um den Landeplatz und wird uns eventuelle Dinge zeigen, welche wir anschließend untersuchen können.“ Zusätzlich lässt sich mit Hilfe der Aufnahmen bereits kurz nach der Landung der exakte Landeort bis auf wenige Meter genau bestimmen noch bevor einer der Marsorbiter ein Bild von Curiosity auf der Planetenoberfläche aufnehmen und an die Erde übermitteln kann.
Des Weiteren werden die von MARDI aufgenommenen Bilder dazu dienen, in Kombination mit den Sensordaten des Rovers die Windgeschwindigkeiten in der Marsatmosphäre zu bestimmen und zu ermitteln, inwieweit der Wind für eine Abdrift des Rovers beim Atmosphärenabstieg verantwortlich war. Diese Daten aus der unteren Schicht der Marsatmosphäre werden in die Planung zukünftiger Marslandungen einfließen. Der aus der Windabdrift resultierende leichte seitliche Versatz des Rovers während des Abstiegs wird es außerdem ermöglichen, aus den Bildern der MARDI-Kamera digitale Höhenmodelle der Marsoberfläche zu erstellen.
Auch nach der Landung auf dem Mars wird die MARDI-Kamera weiterhin aktiv bleiben und den Boden direkt unterhalb von Curiosity im Blick behalten und dort befindliche Steine mit einer Auflösung von wenigen Millimetern pro Pixel abbilden. Diese Aufnahmen stellen einen wichtigen Beitrag für die geologischen Analysen des Geländes dar. Zusätzlich können die für die Steuerung von Curiosity verantwortlichen Roverdriver aus diesen Bildern wichtige Informationen über den Schlupf der Räder oder eine eventuelle seitliche Abdrift während einer Fahrt gewinnen.
Die MARDI-Kamera wurde letzten Monat von den Technikern und Ingenieuren des JPL an Curiosity montiert und wird in den kommenden Wochen und Monaten zusammen mit den anderen bisher montierten Komponenten des Rovers weiteren ausführlichen Überprüfungen unterzogen werden.
Raumcon-Forum: