Ein bereits am vergangenen Samstag aufgetretenes Problem ist der Grund dafür, dass der Rover Curiosity seitdem keine weiteren Fahrten absolvieren konnte. Erste Analysen deuten darauf hin, dass die Probleme mit der Elektrik durch einen „weichen Kurzschluss“ verursacht wurden. Derzeit sind die an der Mission beteiligten Mitarbeiter mit der Fehleranalyse beschäftigt.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS.
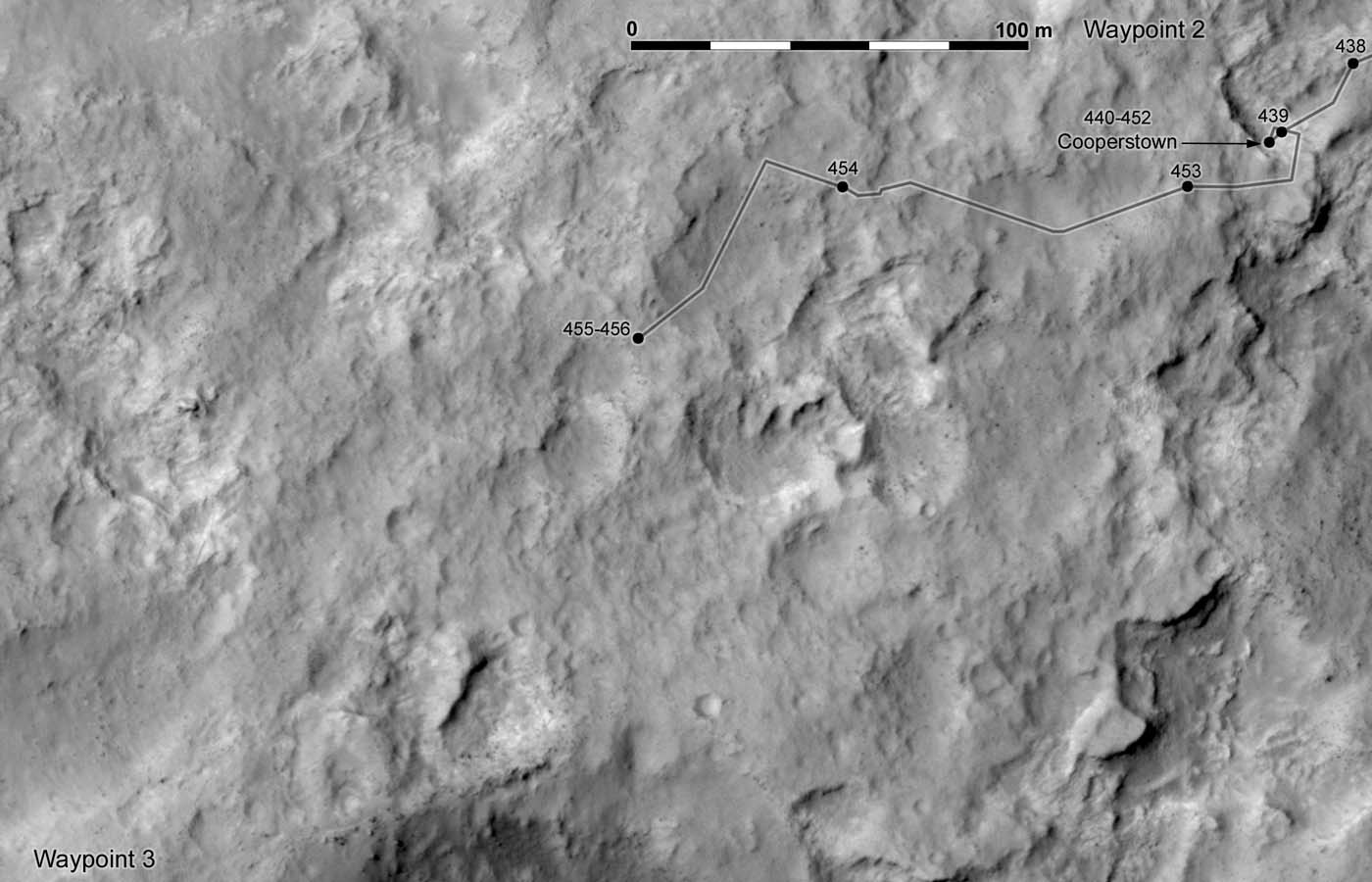
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Nach der Behebung eines im Rahmen eines Software-Updates aufgetretenen Problems, welches dazu führte, dass sich der von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsrover Curiosity vorübergehend in einen sogenannten „Sicherheitsmodus“ versetzte (Raumfahrer.net berichtete), konnte der Rover seine Fahrt am vergangenen Wochenende zunächst erfolgreich fortsetzten. Am 14., 15. und 16. November legte Curiosity dabei im Rahmen von drei Fahrten insgesamt etwa 240 weitere Meter auf der Marsoberfläche zurück.
Allerdings wurde die letzte dieser Fahrten nach einer absolvierten Strecke von rund 88 Metern vorzeitig abgebrochen. Hierfür verantwortlich war einerseits ein teilweise blockierendes Rad, welches sich bei der Fortbewegung des Rovers nicht in dem vorgesehenen Umfang mitbewegte. Zusätzlich wurde eine plötzlich auftretende Spannungsänderung registriert. Diese machte sich durch eine Veränderung des Spannungsunterschiedes zwischen dem Fahrgestell des Rovers und der 32-Volt-Stromschiene bemerkbar, mit der die verschiedenen Systeme von Curiosity mit Strom versorgt werden. Diese Anomalien hatten zur Folge, dass der Rover seine Fahrt nicht – wie eigentlich vorgesehen – am vergangenen Sonntag fortsetzte, sondern stattdessen auf weiterführende Instruktionen von seinem Kontrollzentrum wartete.
Derzeit sind die an der Mission beteiligten Techniker und Ingenieure immer noch damit beschäftigt, die Ursache für das aufgetretene Problem zu analysieren. Aus diesem Grund wurden seit dem vergangenen Samstag keine weiteren Fahrten durchgeführt und auch der wissenschaftliche Betrieb des Rovers ist erst einmal zum Stillstand gekommen.
Ausgeschlossen wird, dass der jetzige Vorfall in einem direkten Zusammenhang mit dem vor zwei Wochen eingetretenen Sicherheitsmodus steht, welcher durch ein fehlerhaftes Update der Betriebssoftware des Rovers ausgelöst wurde. Als wahrscheinliche Ursache für die kürzlich registrierte Spannungsänderung nennt das für den Betrieb des Rovers verantwortliche Team des Jet Propulsion Laboratory (JPL) der NASA vielmehr einen sogenannten „weichen Kurzschluss“. Während sich bei einem „richtigen“ Kurzschluss zum Beispiel zwei nicht isolierte elektrische Kabel berühren, fließt der Strom bei einem „weichen Kurzschluss“ durch Material, welches nur teilweise leitend ist.
Ein solches Ereignis konnte im bisherigen Verlauf der Curiosity-Mission lediglich ein einziges Mal beobachtet werden – nämlich während der Landung des Rovers auf dem Mars. Verursacht durch die Zündung von verschiedenen Pyroladungen, durch welche zum Beispiel der bei der Landung verwendete Skycrane von dem Rover gekappt wurde (Raumfahrer.net berichtete über das Landemanöver), reduzierte sich der Spannungsunterschied zwischen der Stromschiene und dem Fahrgestell von ursprünglich 16 Volt auf 11 Volt, was den Betrieb des Rovers aber nicht weiter beeinträchtigte. Seit dem vergangenen Sonntag beträgt dieser Unterschied allerdings nur noch etwa vier Volt.
Die elektrischen Systeme von Curiosity sind sehr flexibel ausgelegt, so dass auch diese erneute Veränderung des Spannungsunterschiedes grundsätzlich kein Problem darstellt. Allerdings reduziert sich mit jedem weiteren vergleichbaren Ereignis die Toleranz des Gesamtsystems für eventuell zukünftig auftretende „weiche Kurzschlüsse“. Diese Ereignisse können außerdem auf ein zur Zeit noch nicht erkanntes Problem mit dem bisher anscheinend noch nicht identifizierten Bauteil hinweisen, welches für den „weichen Kurzschluss“ verantwortlich ist. Durch die während der letzten Tage erfolgten Analysen der Telemetriewerte des Rovers registrierten die beteiligten Techniker und Ingenieure, dass in den Stunden vor dem dauerhaften Abfall der Spannung drei weitere Spannungsveränderungen erfolgten, bei denen allerdings lediglich temporäre Veränderungen auftraten.
Trotz dieser nicht gerade beruhigenden Meldung halten die Mitarbeiter des JPL „den Ball flach“ und geben sich in den entsprechenden offiziellen Pressemitteilungen entspannt. Im Gegensatz zu früheren Problemen, welche allerdings mit dem Computersystem oder der Software des Rovers in Zusammenhang standen, versetzte sich Curiosity am vergangenen Wochenende nicht in einen Sicherheitsmodus. Dieser spezielle Betriebsmodus tritt automatisch in Kraft, sobald die Telemetriewerte auf ein für den Rover potentiell gefährliches Problem hindeuten. Sobald sich der Rover in diesen Sicherheitsmodus versetzt werden zunächst alle nicht überlebensnotwendigen Aktivitäten eingestellt. Dieser Fall trat diesmal jedoch nicht ein.
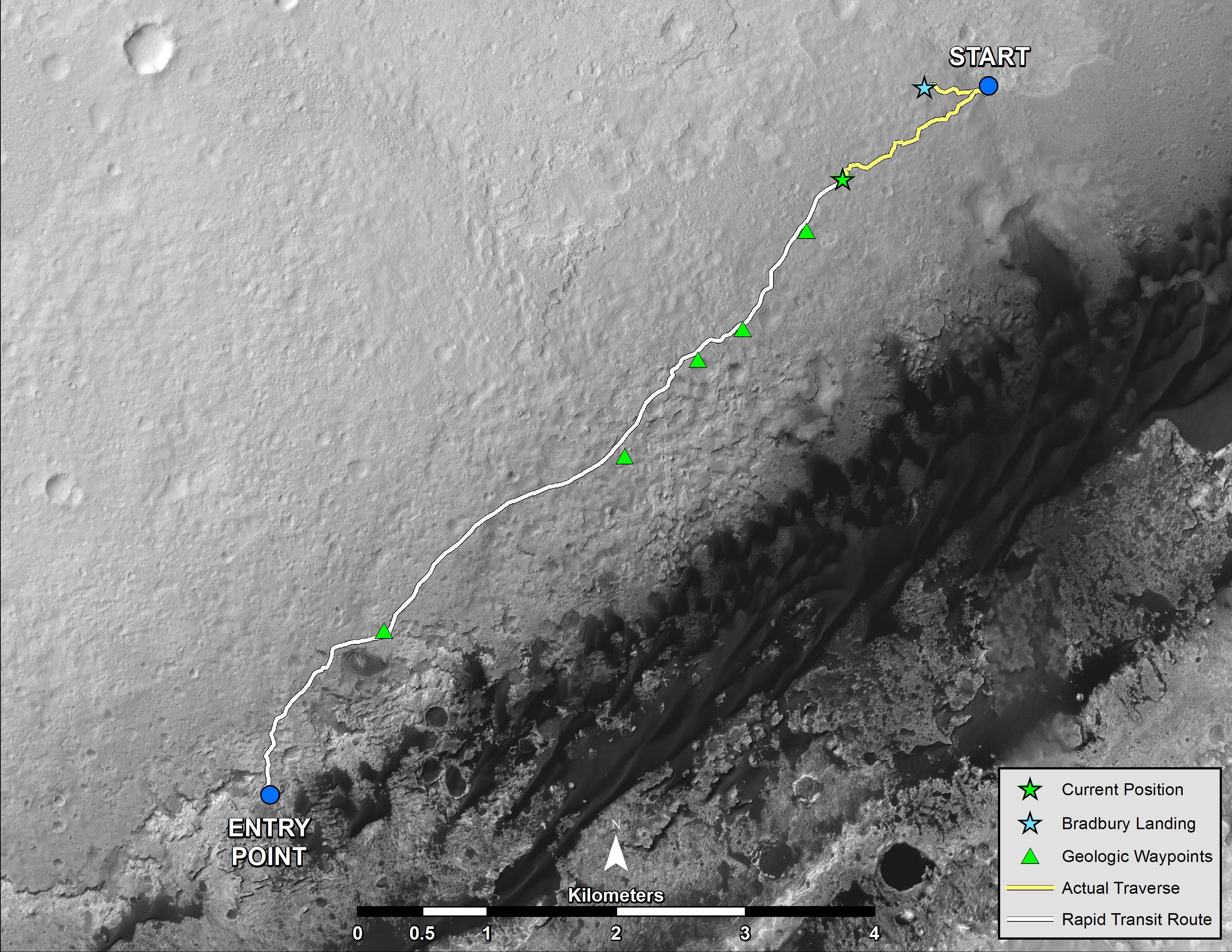
(Bild: NASA, JPL-Caltech)
„Der Rover ist sicher und stabil und in seinem jetzigen Zustand vollständig einsatzfähig. Bei der gegenwärtigen Untersuchung handelt es sich um eine reine Vorsichtsmaßnahme“, so Jim Erickson vom JPL, der Projektmanager der Curiosity-Mission. Und auch die an der Mission beteiligten Wissenschaftler sind zuversichtlich, dass der Rover seinen Betrieb bald wieder aufnehmen kann.
„Sollten die Diagnosen wie vorgesehen verlaufen, dann werden wir eventuell bereits am Donnerstag [also am heutigen Tag] die Planung der zukünftigen wissenschaftlichen Aktivitäten wieder aufnehmen“, so Ken Herkenhoff vom USGS. Sollte es möglich sein, diesen Zeitplan einzuhalten, so könnte Curiosity ab dem morgigen Freitag wieder wissenschaftliche Beobachtungen durchführen.
Diese erneute unerwartete Verzögerung der Fortsetzung der Fahrt dürfte allerdings letztendlich dazu führen, dass die an der Mission beteiligten Wissenschaftler auf dem Weg des Rovers zu seinem nächsten Ziel, der Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons, aus Zeitgründen auf die eigentlich fest eingeplante Untersuchung des „Waypoint 3“ verzichten werden.
Auf der vorgesehenen Route zum Rand des etwa 5,5 Kilometer hohen Berges wurden von den an der Mission beteiligten Wissenschaftlern insgesamt fünf Punkte – die sogenannten „Waypoints“ – ausgewählt, an denen der Rover jeweils mehrtägige Stopps für ausführlichere wissenschaftliche Untersuchungen einlegen soll. Das wissenschaftliche Ziel dieser Analysen besteht darin, Informationen über die Geologie des Geländes zu sammeln, welches sich zwischen der Region Shaler und dem Aeolis Mons befindet. Diese Daten sollen den Wissenschaftlern dabei helfen, die zwischenzeitlich gewonnenen Informationen in einen Kontext zu den Erkenntnissen zu setzen, welche zukünftig bei den geschichteten Gesteinsablagerungen des Zentralberges erlangt werden sollen. Ein spezielles Augenmerk soll dabei auf geologische Strukturen gerichtet werden, welche offensichtlich durch fließendes Wasser erzeugt beziehungsweise verändert wurden.
Bis zum heutigen Tag, dem „Sol“ 460 seiner Mission, hat der Marsrover Curiosity eine Distanz von mehr als 4.300 Metern auf der Oberfläche unseres Nachbarplaneten zurückgelegt. Seit dem Erreichen unseres Nachbarplaneten haben die Kamerasysteme von Curiosity 102.010 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum: