Seit dem 13. März 2006 galt das rechte Vorderrad des Marsrovers Spirit als bewegungsunfähig. Bei einem Test am 13. Dezember 2009 zeigte dieses Rad jedoch überraschenderweise keine Auffälligkeiten und lässt sich seitdem anscheinend auch nach mehren Fahrversuchen noch wie vorgesehen bewegen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, Planetary Society, Raumcon.
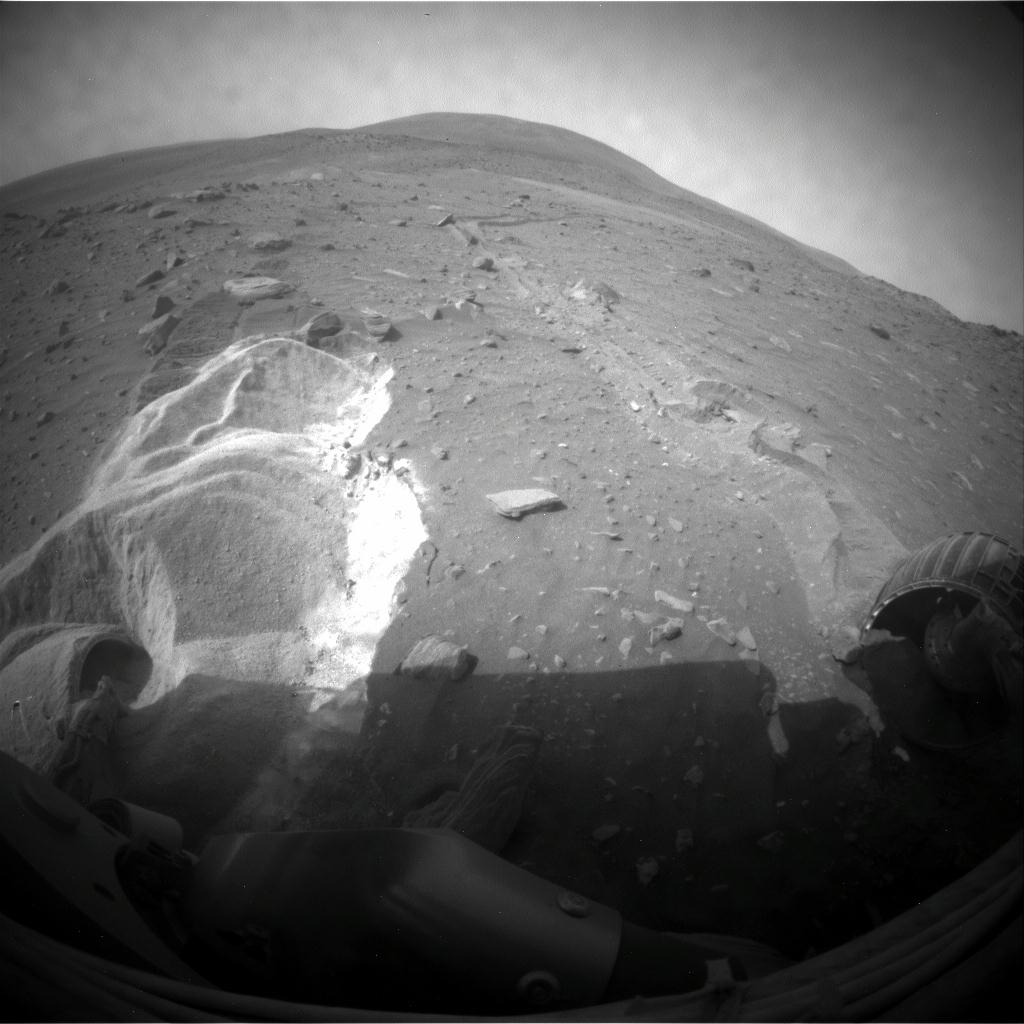
(Bild: NASA, JPL)
Im Frühjahr dieses Jahres bewegte sich der Marsrover Spirit auf seiner Forschungsreise im Gusev-Krater des Mars durch das sogenannte West Valley. Hierbei handelt es sich um eine flache Senke, welche sich am Westrand der Home Plate, einem Vulkan-Plateau, befindet. Am 23. April 2009 geriet der Rover dabei unverhofft auf einen aus extrem feinem Sand bestehenden Untergrund, welcher von einer dünnen Sulfat-Kruste überzogen war. Der Rover brach durch diese Kruste und grub sich mit fünf seiner sechs Räder teilweise bis über die jeweiligen Achsen in den Untergrund ein. In den folgenden Tagen durchgeführte Versuche, den Rover aus dieser „Sandfalle“ zu befreien, verschlechterten die Situation noch weiter. Die für die Steuerung des Rovers verantwortlichen Mitarbeiter des Jet Propulsion Laboratory (JPL) beschlossen daraufhin, die Befreiungsversuche vorerst zu unterbrechen, die Situation ausführlich zu analysieren und in einer speziellen Testanlage eine Strategie zur Befreiung von Spirit zu entwickeln.
Mitte des letzten Monats war man schließlich dazu bereit, mit der Befreiung des Rovers auf dem Mars zu beginnen. Dazu wurden diesem am 17. November 2009 die ersten Fahrbefehle seit sechs Monaten übermittelt. Im Laufe der folgenden Wochen gelang es tatsächlich, den Rover um einige wenige Millimeter zu bewegen. Diese minimalen Geländegewinne entsprachen allerdings vollkommen den Vorhersagen der für die Steuerung von Spirit verantwortlichen „Roverdriver“, welche besonders in der Anfangsphase des Befreiungsversuches mit nur geringen Fortschritten gerechnet hatten. Im Verlauf einer Fahrt am 28. November kam es jedoch zu einem Ausfall des rechten Hinterrades des Rovers, welches seitdem nicht mehr zum Antrieb Spirits genutzt werden konnte (Raumfahrer.net berichtete).
Am 13. Dezember 2009 (Sol 2.113 der Spirit-Mission) wurde aufgrund dieser Entwicklung eine weitere Analyse des rechten Hinterrades durchgeführt. Durch die Zuführung einer erhöhten Stromspannung sollte versucht werden, dieses Rad wieder in eine Drehbewegung zu versetzen. Noch am selben Tag wurde zusätzlich eine Zustandsüberprüfung des rechten Vorderrades durchgeführt. Dieses Rad hatte bereits mehrmals Anlass zur Sorge gegeben, bevor es im Laufe einer Fahrt am 13. März 2006 vollständig blockierte und seitdem nicht mehr für den Antrieb Spirits genutzt werden konnte. Das Verhalten dieses rechten Vorderrades kurz vor dessen endgütigem Ausfall zeigte Parallelen zum jetzigen Verhalten des rechten Hinterrades. Durch die beabsichtigten Messungen wollte man in erster Linie Vergleichswerte für die beiden Räder erhalten und daraus ableitend die aktuelle Situation des Hinterrades besser beurteilen können.
Im Laufe dieses Tests zeigten die Messungen für das rechte Hinterrad einen sehr stark erhöhten Widerstand in der Motorwicklung des Antriebsmotors an. Es war nicht möglich, das Rad in eine Drehbewegung zu versetzen. Umso überraschender verlief dagegen die Diagnose des rechten Vorderrades. Ein Test des elektrischen Widerstandes in dessen Antriebsaktuator zeigte einen Widerstand an, welcher sich innerhalb der normalen Parameter befand. Außerdem kam es im Verlauf dieser Untersuchung zu einer minimalen Vorwärtsbewegung des betreffenden Rades um 0,25 Grad. Dass sich ein operables Rad im Rahmen eines Widerstandstests bewegt, ist normal. Diese stattgefundene Bewegung war jedoch für die Ingeniere und Techniker des JPL deshalb überraschend, weil man im Vorfeld davon ausgegangen war, dass das rechte Vorderrad „nicht operabel“ sei und sich aufgrund eines vermutlich unterbrochenen Stromkreises nicht würde bewegen lassen können.
(Bild: NASA, JPL-Caltech)
Allein aus diesem unerwarteten Ereignis ließen sich jedoch noch keine Aussagen darüber treffen, ob das Vorderrad tatsächlich wieder voll funktionsfähig ist und eventuell für den weiteren Verlauf der Befreiungsfahrt eingesetzt werden könnte. Um dies zu überprüfen, wurde nach einer eingehenden Analyse der vorliegenden Daten für den 17. Dezember eine weitere Fahretappe angesetzt. Die entsprechenden Kommandos sahen vor, dass alle sechs Räder mit einer sehr geringen Rotationsgeschwindigkeit 12 volle Umdrehungen absolvieren sollten. Auf einem „normalen“ Untergrund hätte dies dazu geführt, dass Spirit eine Distanz von etwa 10 Metern absolviert. Aufgrund des gegenwärtig gegebenen Untergrunds und des daraus resultierenden „Schlupfes“ der Räder würde sich die reale Vorwärtsbewegung allerdings lediglich im Millimeterbereich abspielen. Wie befürchtet reagierte das rechte Hinterrad nicht auf die entsprechenden Kommandos. Das rechte Vorderrad dagegen verhielt sich zur Überraschung der Ingenieure während der ersten zehn Rad-Rotationen normal. Allerdings wurden die letzten zwei Umdrehungen nicht mehr ausgeführt. Die restlichen vier Räder zeigten dagegen im gesamten Fahrverlauf keine Auffälligkeiten.

(Bild: NASA, JPL-Caltech, Animation: Raumfahrer.net)
Diese Fahrt wurde in vier Etappen über jeweils 2,5 Meter unterteilt. Am Ende jeder Etappe stoppte der Rover für einen kurzen Zeitraum und fertigte zur Dokumentation der aktuellen Situation und eventuell erzielter Fortschritte mit seinen verschiedenen Kamerasystemen eine Reihe von Bildern an. Im Verlauf der gesamten Fahrt bewegte sich Spirit insgesamt um zwei Millimeter nach vorne und sank um vier Millimeter in den Untergrund ein. Das Absinken des Rovers war zum größten Teil dadurch bedingt, dass sich das rechte Vorderrad besonders in Laufe der ersten Fahrsequenz etwas in den Boden eingrub.
Bereits am folgenden Tag unternahm Spirit dann einen erneuten Anlauf. So erfreut die Ingenieure über die erfolgreiche „Reaktivierung“ des rechten Vorderrades auch waren, so sehr waren sie auch über dessen Aussetzen im Verlauf der vierten Fahrsequenz besorgt. Durch einen weiteren Fahrversuch sollte festgestellt werden, ob es nochmals gelingen würde, dieses Rad wieder in eine Drehbewegung zu versetzen. Dazu wurden dem Rover erneut die Fahrbefehle für eine in vier Etappen aufgeteilte Fahrt über insgesamt zehn Meter übermittelt. Diesmal wurden allerdings nur die vier momentan problemlos arbeitenden Räder, die drei Räder auf der linken Roverseite und das rechte Mittelrad, zeitgleich angetrieben. Das rechte Vorderrad dagegen wurde erst nach der Beendigung einer absolvierten Sequenz der vier restlichen Räder separat gedreht. Im Verlauf dieser Fahrt bewegte sich Spirit erneut um insgesamt etwa 1,5 Millimeter in die vorausliegende nördliche Richtung. Des weiteren erfolgte zugleich ein erneutes Einsinken um drei Millimeter in den Untergrund. Aus den von dieser Fahrt übermittelten Bildern geht eindeutig hervor, dass sich das rechte Vorderrad erneut gedreht hat.
Im Rahmen der letzten Fahrten wurden zudem ausführliche Messungen der elektrischen Spannungen und Widerstände der einzelnen elektronischen Komponenten des Rovers durchgeführt, da sich in den letzten Tagen innerhalb der Elektronik Auffälligkeiten gezeigt hatten, welche sich unter Umständen negativ auf die Gesamt-Funktionalität von Spirit auswirken könnten. Zwischen dem Fahrgestell des Rovers und dessen Erdung darf im Normalfall keine elektrische Spannung auftreten. Bei der Analyse der übermittelten Daten von der Fahrt am 13. Dezember 2009 stellte man jedoch fest, dass dort nun eine dauerhaft anhaltende Spannung vorhanden ist.
(Bild: NASA, JPL-Caltech)
Während der Fahrt am 17. Dezember 2009 wurden aus diesem Grund vor und während der Absolvierung der einzelnen Fahrsequenzen weitergehende Spannungsmessungen durchgeführt. Dabei zeigte sich, dass zwischen dem Rovergehäuse und dem Fahrgestell eine konstante Spannung von minus 5 Volt anlag. Bei der Aktivierung von einem beliebigen der zehn Rad-Motoren (die sechs Räder verfügen über insgesamt sechs Antriebsmotoren und vier Steuerungsmotoren) erhöhte sich diese Spannung auf minus 25 Volt.
Aus bisher nicht bekannten Gründen ist also das ursprünglich vorhandene Nullpotential zwischen dem Fahrgestell und der Bord-Elektronik nicht mehr gegeben. Dadurch tritt ein Potentialgefälle zwischen dem Gestell und verschiedenen elektronischen Bauteilen auf. Da die Erhöhung dieses Gefälles am 17. Dezember 2009 unabhängig davon eintrat, welcher der zehn Motoren aktiviert wurde, vermuten die Ingenieure des JPL, dass das gegenwärtige ungewöhnliche elektrische Verhalten auf einen Defekt im „Motor Controller Board“ zurückzuführen ist, welches für die Steuerung all dieser Motoren Spirits zuständig ist.
Die zwischen einem bestimmten Punkt eines elektrischen Feldes oder Leitersystems und einem willkürlich wählbaren Bezugspunkt bestehende elektrische Spannung wird als das Potential dieses Punktes definiert. Verfügen zwei unterschiedliche Punkte eines Leitersystems über unterschiedliche Potentiale, so besteht zwischen ihnen eine elektrische Spannung, welche als Potentialdifferenz bezeichnet wird. Elektrische Ströme fließen stets von Stellen höheren Potentials zu Stellen niedrigeren Potentials. Aus der aktuell bei Spirits elektrischem System auftretenden Potentialdifferenz ergibt sich somit aktuell die Gefahr, dass es zu Kurzschlüssen in einzelnen Bauteilen der Bordelektronik kommen könnte. Was die Ursache für das Auftreten dieser Spannung ist und ob diese letztendlich zu dem aktuellen Aussetzen des rechten Hinterrades geführt haben könnte, steht bisher noch nicht fest.
Eine weitere Fahrt am heutigen 20. Dezember 2009 zeigte zumindest, dass sich das rechte Vorderrad erneut gedreht hat. Im Rahmen dieser Fahrt konnte sich Spirit erneut minimal in die nördliche Richtung bewegen. Allerdings ist es nach wie vor fraglich, ob es Spirit gelingen wird, sich mit diesen minimalen Bewegungen rechtzeitig aus seinem derzeitigen Gefängnis zu befreien. Aufgrund der Entwicklungsraten der Energiesituation haben die für die Mission Verantwortlichen keine Hoffnung, dass Spirit den anstehenden Marswinter an seiner momentanen Position überstehen kann. Zur Aufrechterhaltung der überlebensnotwendigen Systeme, wie zum Beispiel der Heizungen für den Bordcomputer, der Batterie und der Kommunikationsanlagen, benötigt der Rover pro Tag etwa 140 Wattstunden an Energie. Sollte dieser Wert über einen Zeitraum von mehreren Tagen unterschritten werden, so würden auch die in der Batterie gespeicherten Energiereserven nicht ausreichen, um den Rover weiterhin aktionsfähig zu halten. Selbst eine Reduzierung der für die Beheizung der einzelnen Roverkomponenten aufgewandten Energiemenge könnte dann einen „Kältetod“ nicht mehr abwenden.
Am 9. Dezember 2009 generierte Spirit noch 298 Wattstunden Energie (0,298 kWh). An diesem Tag betrug der Tau-Faktor, welcher die Durchsetzung der Marsatmosphäre mit Staub angibt, 0,517. Je niedriger dieser Wert ausfällt, desto klarer ist die Planetenatmosphäre und umso mehr Licht erreicht letztendlich die Oberfläche des Mars. Sowohl Spirit als auch sein baugleicher „Kollege“, der auf der anderen Seite des Mars aktive Rover Opportunity, werden ausschließlich durch Solarenergie betrieben. Der Bedeckungsgrad der dafür verwendeten Solarpaneele betrug für Spirit an diesem Tag 0,563. Dies bedeutet, dass damals rund 56 Prozent der für die Energieversorgung des Rovers entscheidenden Sonneneinstrahlung die Oberfläche der Solarpaneele erreichten. Eine Woche später, am 16. Dezember 2009, konnte Spirit bereits nur noch 277 Wattstunden pro Tag generieren. In diesem Zeitraum hat sich der Tau-Faktor auf einen Wert von 0,503 verbessert. Im selben Zeitraum verschlechterte sich der Bedeckungsgrad der Solarflächen lediglich um weniger als ein Prozent auf jetzt 0,557.
Diese momentane negative Entwicklung der Energiesituation basiert auf dem Fortschreiten der Jahreszeiten auf dem Mars. Mit der dort erfolgten Sonnenwende am 26. Oktober 2009 setzte auf dessen Südhalbkugel, Spirit operiert bei 14,6 Grad südlicher Breite, der Herbst ein. Dies hat zur Folge, dass dort die Tage zunehmend kürzer werden und täglich immer weniger Sonnenlicht die Oberfläche der Solarpaneele erreichen kann. Sollte sich der gegenwärtige Trend, nämlich eine Reduzierung der täglich generierten Energiemenge um jeweils etwa 20 Wattstunden pro Woche, fortsetzten, dann ist damit zu rechnen, dass Spirit in etwa zwei Monaten verloren gehen wird. Aus diesem Grund wird das für die Steuerung des Rovers verantwortliche „Marsrover-Driver“-Team auch in den kommenden Tagen weitere Anstrengungen unternehmen, um Spirit in eine für dessen Energiehaushalt optimalere Position zu manövrieren. Zeitgleich finden am JPL, von wo aus die derzeit aktiven Marsrover gesteuert werden, weiterführende Tests statt. Im Verlauf dieser Tests will man Einblick in den aktuellen Zustand des Energieflusses innerhalb des Rovers erhalten. Unabhängig davon sucht man auch weiterhin nach Möglichkeiten, Spirit mit alternativ vier, fünf oder sogar sechs operablen Rädern aus der als „Troy“ benannten Sandfalle zu befreien.
Raumcon-Forum
Internetseite des JPL