Bei der Rover Environmental Monitoring Station (REMS) handelt es sich um eine Wetterstation, welche während der gesamten Missionsdauer von mindestens einem Marsjahr in regelmäßigen Abständen diverse meteorologische Daten aufzeichnen wird. Auf diese Weise erhalten die an der Mission beteiligten Atmosphärenforscher einen tieferen Einblick in das über ein komplettes Marsjahr ablaufende Wettergeschehen im Operationsgebiet des Rovers.
Ein Beitrag von Ralph-Mirko Richter

(Bild: NASA, JPL-Caltech)
Zwecks allgemeiner meteorologischer Messungen wurde der Marsrover Curiosity von seinen Konstrukteuren mit der „Rover Environmental Monitoring Station“ (kurz „REMS“) ausgestattet. Die an der Mission beteiligten Wissenschaftler gehen davon aus, dass diese Wetterstation eine zentrale Rolle im Studium der täglichen und saisonalen Wetterbedingungen und -veränderungen auf unserem Nachbarplaneten einnehmen wird. REMS ist die erste Wetterstation, welche im Rahmen einer Rovermission auf dem Mars eingesetzt wird und somit Daten von verschiedenen Orten liefern kann. Vorherige Wetterstationen waren lediglich im Rahmen verschiedener stationärer Marslander-Missionen im Einsatz.
Verschiedenen Sensoren werden dazu in regelmäßigen Abständen die aktuellen Windgeschwindigkeiten und -richtungen, den Luftdruck, die relative Luftfeuchtigkeit, die Lufttemperatur, die Bodentemperatur und die Menge der einfallenden UV-Strahlung ermitteln. Das UV-Messgerät (kurz „UVS“ für „Ultraviolet Sensor“) und der Drucksensor sind direkt auf beziehungsweise unmittelbar unterhalb des „Rover Equipment Deck“ – der Oberseite von Curiositys Grundgestell – montiert. Die anderen Sensoren sind im Inneren von zwei jeweils knapp 15 Zentimeter langen, stabförmigen Auslegern untergebracht, welche sich am „Remote Sensing Mast“ – dem Kameramast des Rovers – befinden. Die zentrale Elektronik von REMS – die „Instrument Control Unit“ („ICU“) – befindet sich dagegen im Inneren der „Warm Electronics Box“ („WEB“). Das Gesamtgewicht des Instruments beträgt 1.365 Gramm. Die gesamte Wetterstation ist dazu ausgelegt, um innerhalb eines Temperaturbereiches zwischen minus 130 Grad Celsius bis hin zu über plus 30 Grad Celsius operieren zu können.
Die beiden am Kameramast des Rovers befestigten stabförmigen Ausleger befinden sich in einer Höhe von etwa 1,5 Metern über der Marsoberfläche. Jeder dieser Ausleger verfügt über ein Themosäulen-Thermometer und einen Hitzedraht-Windmesser. Die Thermometer können die Lufttemperatur in einem Messbereich zwischen plus 23 Grad Celsius bis zu minus 123 Grad Celsius ermitteln, wobei die Auflösung der Instrumente bei 0,1 Grad Celsius liegt.
Die Windsensoren können horizontale Winde in einem Bereich von 0 bis 70 Metern pro Sekunde bei einer Auflösung von etwa 0,5 Metern pro Sekunde mit einer Genauigkeit von 1 Meter pro Sekunde messen. Die vorherrschende Windrichtung kann dabei mit einer Genauigkeit von besser als 30 Grad bestimmt werden. Vertikal auftretende Winde können dagegen im gleichen Toleranzbereich bis zu einer Geschwindigkeit von etwa 20 Metern pro Sekunde erfasst werden.
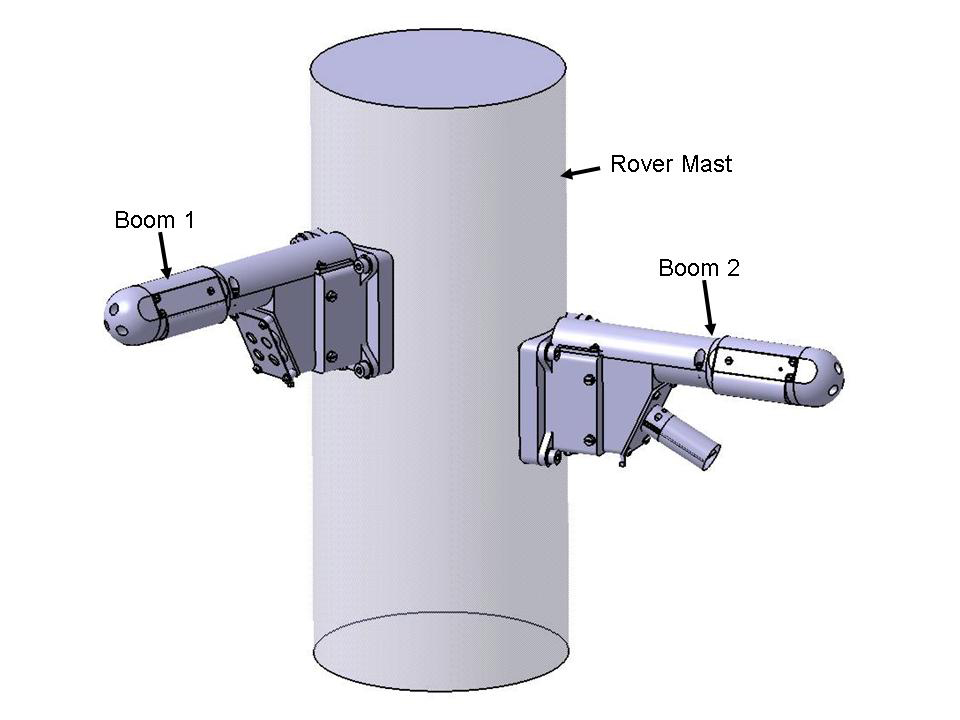
(Bild: NASA, JPL-Caltech)
Die beiden Ausleger sind in ihrer horizontalen Ausrichtung um 120 Grad und in der Vertikalen um etwa 50 Zentimeter versetzt. Durch diese Anordnung soll sichergestellt werden, dass die Windsensoren optimale Daten über die vorherrschenden Windrichtungen sammeln können. Außerdem ergeben sich durch die unterschiedlichen Höhen der Sensoren unterschiedliche Temperaturprofile relativ zur Höhe über der Planetenoberfläche. Für ihre Kalibrierung wurden die Windsensoren im Vorfeld der Curiosity-Mission in einem Windkanal unter marsähnlichen Bedingungen ausführlich getestet.
In einem der beiden Ausleger, dem auf die rechte Seite des Rovers weisenden „Boom 1“, befinden sich zudem drei nach unten gerichteter Infrarot-Sensoren für die Bestimmung der Temperatur auf der Marsoberfläche. Diese am Institut für Photonische Technologien (IPHT) in Jena entwickelten Infrarotsensoren arbeiten ebenfalls in einem Messbereich von plus 27 Grad Celsius bis zu minus 123 Grad Celsius und können die Oberflächentemperatur bei einer Auflösung von bis zu 0,1 Grad Celsius in Echtzeit ermitteln.
Das in einem zusätzlich schützenden Zylinder befindliche Messgerät für die relative Luftfeuchtigkeit ist an dem zweiten Kameramast-Ausleger, dem in die Fahrtrichtung zeigenden „Boom 2“, montiert und kann nur bei Außentemperaturen von mehr als minus 90 Grad Celsius eingesetzt werden. Ab einer Lufttemperatur von mehr als minus 73 Grad Celsius erreicht dieser Sensor bei einer Auflösung von einem Prozent eine Messgenauigkeit von mindestens fünf Prozent. Ein spezieller Staubfilter schützt den Sensor dabei vor Verunreinigungen durch den in der Marsatmosphäre enthaltenen Staub.

(Bild: CSIC-INTA)
Der auf der Oberseite des zentralen Chassis befindliche Ultraviolett-Sensor ist mit insgesamt sechs Photodioden ausgestattet, welche das UV-Spektrum im Bereich der UV-A-Strahlung bis hin zur UV-E-Strahlung abdecken (315 bis 370 Nanometer für UV-A, 280 bis 320 Nanometer für UV-B, 220 bis 280 Nanometer für UV-C, 230 bis 290 Nanometer für UV-D, 300 bis 350 Nanometer für UV-E, 200 bis 370 Nanometer für den gesamten UV-Bereich). Die Messgenauigkeit des Sensors liegt bei besser als acht Prozent für jeden der verschiedenen Messbereiche, wobei eine Genauigkeit von 0,5 Prozent erreicht wird. Die einzelnen Dioden sind so platziert, dass sie direkt in Richtung Zenit zeigen und dabei ein Messfeld von 60 Grad abdecken. Die sechs aus Siliziumcarbid bestehenden SiC-Photodioden wurden von der Firma IFW Optronics GmbH in Jena entwickelt und hergestellt.
Um eine Abschwächung der einfallenden UV-Strahlung zu vermeiden, sind die Dioden mit keiner zusätzlichen Schutzabdeckung ausgestattet. Dies hat jedoch den Nachteil, dass die Dioden im Laufe der Zeit sehr wahrscheinlich mit einer Staubschicht bedeckt werden. Da dieser sich auf der Oberseite des Rovers ablagernde Staub die Messungen allerdings verfälschen könnte, befindet sich in der unmittelbaren Nähe der Photodioden ein aus sechs Magneten bestehender Ring, welcher den magnetischen Anteil des Marstaubes von den Dioden ablenken soll. Ein siebter Magnet ist in der Mitte der Dioden platziert. Als zusätzliche Maßnahme werden des weiteren mit der Mastkamera des Rovers in regelmäßigen Abständen Aufnahmen der sechs Dioden angefertigt, um den aktuellen Grad der Staubbedeckung zu ermitteln und die Messergebnisse so entsprechend zu korrigieren.
Die Ermittlung des aktuellen Grades der auf die Marsoberfläche einfallenden UV-Strahlung wird den Wissenschaftlern dabei helfen, die dadurch verursachten Verwitterungsprozesse der Gesteine und Böden besser zu verstehen. Außerdem ergibt sich durch die entsprechenden Messungen ein Überblick über die zu erwartende Strahlenbelastung, welcher zukünftige Astronauten auf dem Mars ausgesetzt sein werden. REMS ist das erste im Rahmen einer Marsrover- oder Marslander-Mission eingesetzte Instrument, welches UV-Daten direkt von der Marsoberfläche liefern wird.
Der ebenfalls zur REMS gehörige Drucksensor befindet sich unterhalb des Roverdecks im Inneren des Roverchassis in der unmittelbaren Nähe der Elektronik-Kontrolleinheit des REMS-Instrumentes. Um trotzdem Daten von der Marsatmosphäre sammeln zu können, ist dieser vom Finnischen Meteorologischen Institut (FMI) entwickelte Sensor durch einen kleinen Tubus mit der Außenwelt verbunden. Auch dieser Tubus ist durch eine speziellen Vorrichtung – einen HEPA-Filter – geschützt, welche verhindern soll, dass der allgegenwärtige Staub der Marsatmosphäre den Drucksensor verunreinigt. Der Messbereich dieses Sensors liegt zwischen 1 und 1.150 Pascal. Die Aufgabe des Drucksensors besteht darin, Daten über den sich verändernden Atmosphärendruck zu sammeln, welcher zu Beispiel durch Staubteufel, atmosphärische Gezeitenwellen oder Kalt- bzw. Warmfronten verursacht werden kann. Bei einer Genauigkeit von etwa drei Pascal erreicht der Drucksensor bei seinen Messungen eine Auflösung von bis zu 0,5 Pascal.

(Bild: CSIC-INTA)
Für die Erstellung eines aussagekräftigen und langfristigen Wetterprofils im Operationsgebiet von Curiosity sind regelmäßig erfolgende Messungen notwendig. Aus diesem Grund, so die Planungen der Wissenschaftler, sollen alle Sensoren der REMS an jedem Tag der Mission in jeder Stunde für mindestens fünf Minuten aktiviert sein und dabei Daten sammeln. Dies wird durch einen hohen Autonomiegrad der gesamten Station ermöglicht, wodurch kein permanentes Eingreifen der Bodenkontrolle in die Operationen der REMS erforderlich ist. REMS wird sich die meiste Zeit selbstständig zu den zuvor programmierten Zeitpunkten aktivieren, die gewünschten Daten sammeln, diese Daten im Bordcomputer ablegen und sich danach bis zur nächsten Aktivitätsphase wieder deaktivieren.
Unabhängig von diesem routinemäßigen Vorgehen, welches pro Missionstag insgesamt eine etwa zweistündige Aktivierung von REMS vorsieht, besteht aber trotzdem die Möglichkeit, dass REMS im gegebenen Fall auch zusätzliche und ausführlichere Messungen sowohl einzelner Sensoren als auch der gesamten Instrumenten-Einheit durchführen kann. Auf diese Weise kann REMS auch auf unvorhergesehene Ereignisse wie zum Beispiel plötzlich auftretende ungewöhnlich starke Winde oder starke UV-Strahlungen reagieren.
Die „Rover Environmental Monitoring Station“ ist ein Beitrag des spanischen Wissenschaftsministeriums und des spanischen Zentrums für Technologieentwicklung. Der für dieses Instrument hauptverantwortliche Wissenschaftler, Javier Gómez-Elvira, ist am Centro de Astrobiología (INTA-CSIC) in Madrid/Spanien beschäftigt. Für die Entwicklung von REMS, den Betrieb des Instruments und die Auswertung der wissenschaftlichen Daten wurde ein aus 40 Wissenschaftlern und Ingenieuren bestehendes Team eingesetzt.
Bei der Entwicklung der Wetterstation musste ein erschwerender Faktor berücksichtigt werden: die Temperaturverhältnisse auf dem Mars.
Zum einen treten auf der Marsoberfläche während des Marswinters und des darauffolgenden Sommers generell große Temperaturunterschiede auf. Aber auch während des Tages und der anschließenden Nacht variieren die Temperaturen auf dem Mars innerhalb von lediglich etwa 12 Stunden um teilweise deutlich mehr als 150 Grad Celsius. Zusätzlich werden diese Temperaturunterschiede aufgrund des geringen Luftdrucks der Marsatmosphäre verstärkt. Bereits wenige Zentimeter über dem Boden liegt die Lufttemperatur deutlich unterhalb des Temperaturwertes, welcher direkt auf der Marsoberfläche erreicht wird. Während direkt auf dem Boden in der Mittagszeit Temperaturen von bis zu plus 30 Grad Celsius auftreten können, werden in etwa zwei Metern Höhe zum selben Zeitpunkt lediglich etwa Null Grad Celsius oder weniger erreicht. Die größte Herausforderung für die Entwickler der REMS bestand somit darin, die verschiedenen Sensoren der Wetterstation so auszulegen, dass sie gegenüber diesen Temperaturvariationen unempfindlich sind.
„Die zu gewinnenden Daten werden uns zeigen, ob die örtlichen Gegebenheiten für die Existenz mikrobiologischer Lebensformen günstig sind. Des weiteren werden die Daten unser Verständnis über die globalen atmosphärischen Bedingungen auf dem Mars verbessern“, so Javier Gómez-Elvira. „Die bisherigen Modelle bezüglich der Marsatmosphäre basieren bisher hauptsächlich auf den Daten der verschiedenen Marsorbiter. Unsere „Vor-Ort-Messungen“ bieten eine Möglichkeit, diese Daten zu überprüfen und die bestehenden Modelle zu verbessern.“
Ein Beispiel hierfür ist die Luftfeuchtigkeit. In welchem Umfang speichert die Marsoberfläche den in der Atmosphäre befindlichen Wasserdampf und in welchem Maß wird dieser im Laufe der Jahreszeiten dabei unter den sich dabei verändernden Umweltbedingungen wieder in die Atmosphäre abgegeben? Die unmittelbar oberhalb der Planetenoberfläche operierende REMS kann hierzu deutlich präzisere und somit auch aussagekräftigere Daten liefern als die Instrumente der verschiedenen Marsorbiter. Daten über den sich verändernden Luftdruck werden dagegen dabei helfen, das Verständnis über die regional und global auftretenden Staubstürme auf dem Mars zu verbessern. Zu welchen Zeitpunkten und unter welchen speziellen Bedingungen entwickeln sich die marsianischen Staubstürme, welche dabei teilweise den gesamten Planeten für mehrere Monate mit einem Staubschleier überziehen können?
Im Vorfeld der Curiosity-Mission führte das REMS-Team mehrere Outdoor-Testkampagnen in der Antarktis, in Nevada und in der Region Los Monegros in Spanien durch, wobei die verschiedenen Sensoren Bedingungen ausgesetzt wurden, welche den zu erwartenden Umweltbedingungen auf dem Mars in etwa ähneln. Neben den relativ großen Temperaturunterschieden zwischen Tag und Nacht war für die Auswahl des spanischen Testgeländes für diese Outdoor-Tests auch das semiaride Klima in der Region und die geochemische Zusammensetzung des dortigen Bodens entscheidend. Die Ergebnisse dieser Testkampagnen werden den Wissenschaftlern dabei helfen, die Messergebnisse der REMS in einen besseren Kontext zu versetzen.
Diskussion zu diesem Artikel
Verwandte Webseiten
- Gómez-Elvira et al., 2009: REMS Instrument
- Sebastián et al., 2010: REMS, Pyrometer for Measuring Ground Temperature on Mars
- NASA: Spain Supplies Weather Station for Next Mars Rover
- NASA: Rover Environmental Monitoring Station (REMS)
- Centro de Astrobiología: REMS
- El País: Tecnología española para el nuevo laboratorio de la NASA en Marte
- IPHT Jena: IPHT-Sensoren auf dem Weg zum Mars
- Video: REMS on MARS: Tecnología española en el planeta rojo (span.)