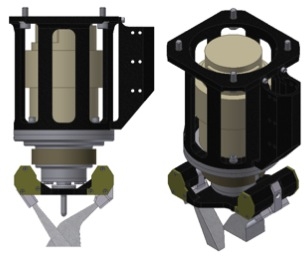
Am Ende des 1,9 Meter langen, an der Frontseite des Rovers befestigten Roboterarms befindet sich ein fast 60 Zentimeter durchmessender und rund 33 Kilogramm schwerer, drehbarer Aufsatz. Neben dem APXS-Spektrometer und der MAHLI-Kamera sind an diesem Aufsatz drei weitere Geräte montiert, welche der Reinigung der Marsoberfläche von Staubablagerungen und der Entnahme von Bodenproben dienen.
Ein Beitrag von Ralph-Mirko Richter
Bei dem „Dust Removal Tool“ (DRT) handelt es sich um eine aus rostfreien Borsten bestehende Bürste, mit der die zu untersuchenden Gesteinsformationen von der obersten Staubschicht befreit werden können. Eine solche Staubschicht, welche unter Umständen seit Jahrmillionen den auftretenden Umweltbedingungen – einschließlich der einfallenden Strahlung – ausgesetzt war, könnte zum Beispiel die Messergebnisse des APXS-Spektrometers verfälschen. Im Operationsbetrieb wird die Bürste auf dem zu reinigenden Oberflächenbereich aufgesetzt und durch einen Motor in eine rotierende Bewegung versetzt. Der dabei von einer Staubschicht zu „reinigende“ Bereich der Marsoberfläche weist einen Durchmesser von mindestens 45 Millimetern auf. Das DTR des Rovers Curiosity wurde von der Firma Honeybee Robotics entwickelt, welche bereits für den Bau der im Rahmen der Mars Exploration Rover-Mission von den beiden Marsrovern Spirit und Opportunity verwendeten Rock Abrasion Tools (kurz „RAT“) verantwortlich war.
Bei dem zweiten Probenentnahmegerät handelt es sich um das „Powder Acquisition Drill System“ (PADS). Dieses Bohrsystem kann 1,6 Zentimeter durchmessende und – abhängig von der Zusammensetzung der anzubohrenden Bodenprobe – bis zu fünf Zentimeter tiefe Löcher in die Planetenoberfläche oder in Gesteine bohren. Die Umdrehungszahl des Bohrers liegt bei einem Bohrvorgang je nach gewählter Einstellung zwischen 0 bis hin zu 150 Umdrehungen pro Minute. Neben der drehenden Bewegung kann der Bohrkopf des PADS bei einer erfolgenden Bohrung auch nach dem Prinzip einer Schlagbohrmaschine bis zu 30 mal pro Sekunde gegen das anzubohrende Gestein gehämmert werden, wodurch das Ziel effizienter zerkleinert und durchdrungen werden kann. Die dabei erreichte Aufschlagenergie kann zwischen 0,05 und 0,8 Joule variiert werden.
Das PADS ist von seinem mechanischen Aufbau her so ausgelegt, dass Bohrungen auf einem ebenen Untergrund bis zu einer Hanglage mit bis zu 20 Grad Neigung durchgeführt werden können, wobei der Roboterarm den Bohrer mit einer Kraft von 240 bis 300 Newton gegen die Oberfläche presst. Sollte sich der Bohrer bei einer Bohrung festfahren und nicht mehr aus dem Untergrund heraus gezogen werden können oder sollte er soweit abgenutzt sein, dass keine erfolgreichen Bohrungen mehr durchgeführt werden können, so kann dieser von dem Bohrergehäuse abgetrennt und anschließend durch einen Reservebohrer ersetzt werden. Zu diesem Zweck sind zwei Reservebohrer in zwei speziellen Behältern, den so genannten „Bit Boxes“, an der Vorderseite Curiositys verfügbar.
Das gesamte Bohrsystem ist für insgesamt 81 Bohrvorgänge ausgelegt. Der Temperaturbereich, in dem das System arbeiten kann, liegt in einem Bereich zwischen minus 70 Grad Celsius bis hin zu plus 70 Grad Celsius.
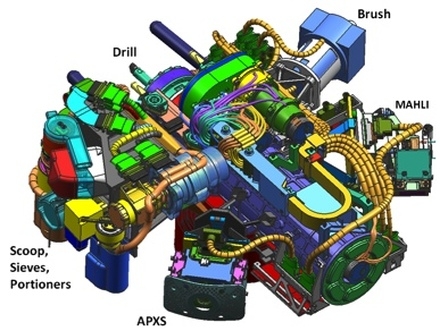
(Bild: NASA, JPL-Caltech)
Das im Rahmen eines Bohrvorganges pulverisierte Marsgestein wird bis zu einer Bohrtiefe von bis zu zwei Zentimetern direkt an die Oberfläche befördert und kann dort anschließend durch die anderen Instrumente des Rovers untersucht werden. Material aus Tiefen von zwei bis fünf Zentimetern wird dagegen durch den Bohrer direkt in eine spezielle Kammer transportiert, welche durch eine kleine Röhre mit dem „Collection and Handling for Interior Martian Rock Analysis“ (CHIMRA), dem dritten Probenentnahmegerät, verbunden ist. Der Transport des Materials zum CHIMRA wird durch eine gesteuerte Dreh- und Schwenkbewegung des Roboterarm-Aufsatzes und durch gezielte Vibrationen kontrolliert.
Zusätzlich ist CHIMRA mit einer kleinen Baggerschaufel ausgestattet, mit welcher Bodenproben aus einer Tiefe von bis zu 3,5 Zentimetern unter der Oberfläche direkt entnommen werden können. Noch größere Tiefen kann die Schaufel dadurch erreichen, indem die Proben an Stellen entnommen werden, wo die Räder des Rovers zuvor tiefe Furchen in die Planetenoberfläche „gefräst“ haben. Auf diese Weise, so die Konstrukteure Curiositys, sind dem CHIMRA Bodenproben aus einer Tiefe von bis zu etwa 20 Zentimetern zugänglich. Die durch die Schaufel entnommenen Proben weisen ein Volumen von 1.000 bis zu 30.000 Kubikmillimetern auf.
Das CHIMRA ist mit zwei Sieben ausgestattet, durch welche Partikel kleiner als 150 Mikrometer oder kleiner als ein Millimeter aus einer gewonnenen Bohrprobe herausgefiltert werden können. Die zuvor gesiebten Proben werden anschließend in verschiedene Probenauffangbehälter weitergeleitet, von wo aus sie zwecks eingehender Untersuchungen an die beiden im Inneren des Rovers befindlichen Analyseinstrumente SAM und CheMin weiter transportiert werden. CheMin kann dabei allerdings nur die Proben analysieren, welche über Partikelgrößen von weniger als 150 Mikrometern verfügen.
Nach der erfolgten Überführung einer Probe an SAM oder CheMin werden die Auffangbehälter von CHIMRA gekippt und durch die Aktivierung eines Vibrationssystems vollständig geleert. Auf diese Weise soll sicher gestellt werden, dass die Analyseinstrumente des Rovers nicht versehentlich Materialproben von verschiedenen Orten auf der Marsoberfläche zeitgleich untersuchen, was die Messergebnisse verfälschen würde. Als zusätzliche Sicherungsmaßnahmen gegen eine Verunreinigung der Proben sind die Öffnungen der einzelnen Probenentnahmensysteme mit Schutzabdeckungen versehen, welche verhindern sollen, dass der allgegenwärtige Marsstaub in das Innere der Systeme gerät und dadurch ebenfalls nachfolgende Messergebnisse verfälscht werden.
Am 11. Juni 2012 gab das für die Kontrolle des Marsrovers Curiosity zuständige Jet Propulsion Laboratory (JPL) bekannt, dass bei den Bohrvorgängen des PADS eventuell geringe Mengen an Teflon durch zwei Dichtungen bis zu dem Bohrgestänge gelangen werden, welche anschließend eventuell auch mit dem freigelegten Material aus der Marsoberfläche in Kontakt treten und sich mit diesem vermischen könnten. Dieses Problem stellt soweit keine Gefahr für den Bohrer dar. Allerdings würde in einem solchen Fall neben dem zu analysierenden Bodenmaterial auch ein geringer Anteil an Teflon in das Innere der Instrumente SAM und CheMin gelangen. Aufgrund der Tatsache, dass Teflon zu 60 Prozent aus Kohlenstoff besteht, würde dies zu einer Verfälschung der Messergebnisse speziell des SAM-Instrumentes führen.
Dieses Problem wurde erst kurz vor dem Start des Rovers im November 2011 erkannt und seitdem sind die Ingenieure des JPL und der Herstellerfirma des Bohrsystems auf der Suche nach einer Lösung. Dabei herrscht „vorsichtiger Optimismus“, dass das Problem in den Griff zu bekommen ist. Ein angedachter Lösungsvorschlag bezieht sich auf die Art und Weise, wie der Bohrer auf dem Mars arbeiten wird. Eventuell kann die Freisetzung des Teflons durch eine geringere Umdrehungszahl des Bohrgestänges bei den Bohrvorgängen verhindert werden. Allerdings wird eine entsprechende Lösung sehr wahrscheinlich erst nach der Landung auf dem Mars zur Verfügung stehen.
Diskussion zu diesem Artikel