Der Marsrover Curiosity befindet sich weiterhin auf dem Weg zur Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons. In den letzten Tagen kam es dabei mehrfach zu vorzeitig erfolgenden Abbrüchen der Fahrten, welche durch verschiedene Geländehindernisse bedingt waren.
Ein Beitrag von Ralph-Mirko Richter. Quelle: USGS, JPL, UMSF.
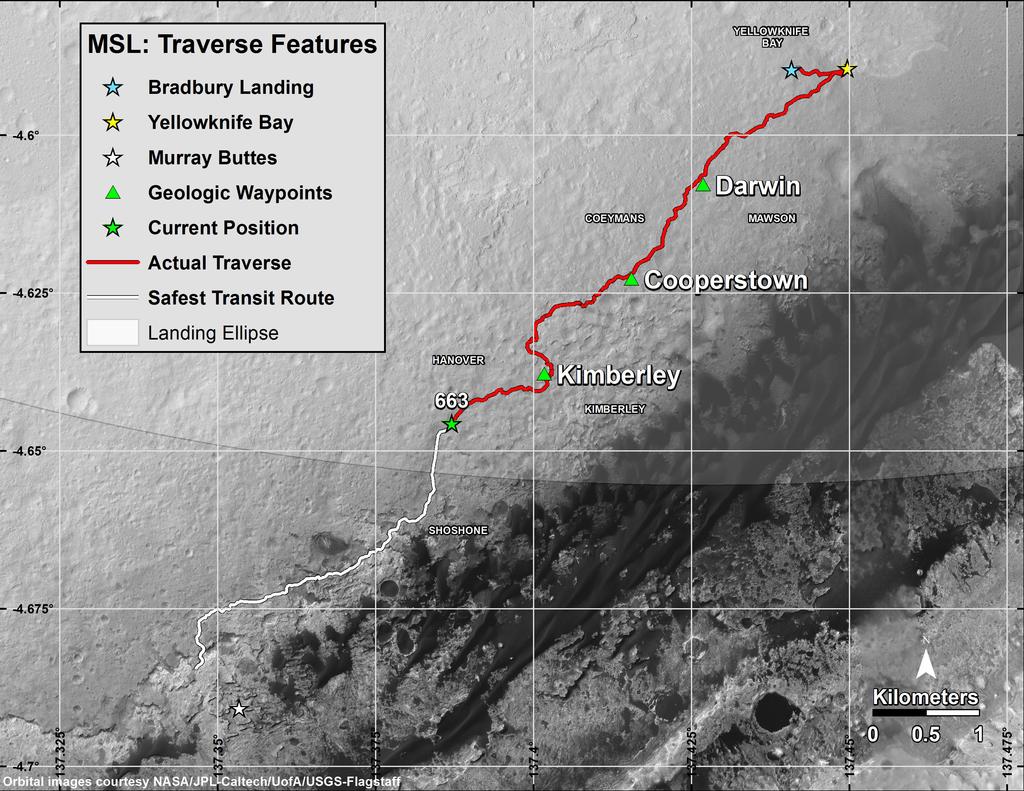
(Bild: NASA, JPL-Caltech, University of Arizona, USGS)
Seit unserem letzten ausführlicheren Bericht über die Mission des von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsrovers Curiosity hat sich dieser im Rahmen von mehreren Fahrten weiter auf sein nächstes ‚großes Ziel‘ zu bewegt. Hierbei handelt es sich um eine mit dem Namen „Murray Buttes“ belegte Region an der Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons. Aufnahmen von verschiedenen Marsorbitern zeigten bereits im Vorfeld der Curiosity-Mission, dass dieser etwa 5.500 Meter hohe Berg über einen ausgeprägten Schichtaufbau verfügt. In den einzelnen Schichten ist – vergleichbar mit den Steilwänden des Grand Canyon im US-Bundesstaat Arizona – die langfristige klimatologische und geologische Geschichte dieser Region der Marsoberfläche enthalten.
Anders als in Bohrkernen liegen diese Informationen dabei offen zutage und sind für Curiosity mehr oder weniger leicht einsehbar. Durch eine langsame, mit ausführlichen Analysen von aus geologischer Sicht interessant erscheinenden Ablagerungen verbundene ‚Besteigung‘ des Berges soll diese Geschichte im weiteren Verlauf der Mission Schritt für Schritt erforscht und entschlüsselt werden. Auf diese Weise erhoffen sich die auf die Erforschung des Mars spezialisierten Wissenschaftler weitere Erkenntnisse darüber, wann, wie, warum und in welchem Zeitraum sich das Klima und die Umweltbedingungen auf dem Mars einstmals so dramatisch verändert haben.
Die Priorität der an der Mission beteiligten Wissenschaftler und der für die Steuerung von Curiosity verantwortlichen Roverdriver des Jet Propulsion Laboratory (JPL) liegt derzeit darin, sich möglichst schnell dem vorgesehenen Ankunftspunkt an der Basis des Aeolis Mons zu nähern. Statt die zur Verfügung stehende Zeit und Energie in erster Linie für wissenschaftliche Untersuchungen zu nutzen werden deshalb stattdessen möglichst große Tagesetappen absolviert. Bei einigen der in den letzten Tagen absolvierten Fahrten wurden dabei pro Tag auch Strecken von teilweise deutlich mehr als 100 Metern überbrückt.
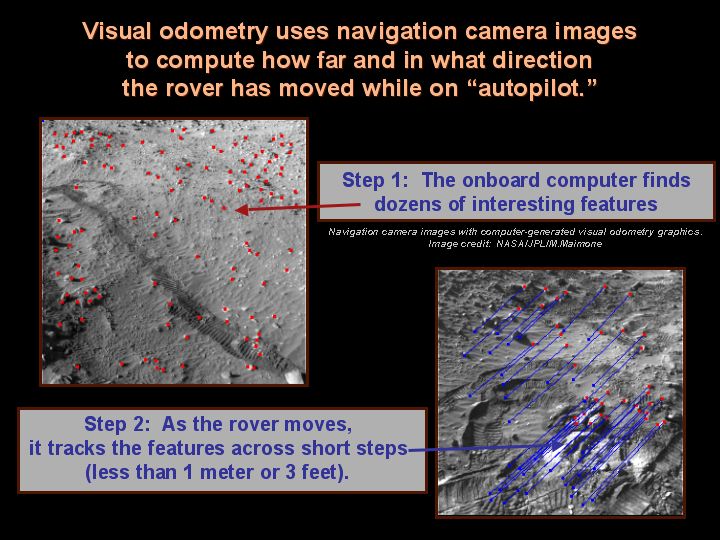
(Bild: NASA, JPL-Caltech, M. Maimone)
Autonome Navigation
Aufgrund der großen Distanz zwischen Erde und Mars – abhängig von der Konstellation der beiden Planeten kann die Signallaufzeit bis zu 22 Minuten betragen – kann Curiosity von den Roverdrivern jedoch nicht etwa mittels eines Joysticks ‚in Echtzeit‘ navigiert werden. Vielmehr müssen sämtliche von dem Rover zu absolvierenden Manöver im Voraus bis ins Detail geplant und festgelegt werden. Nach der Übertragung der entsprechenden Kommandosequenzen führt der Rover diese Manöver dann selbstständig durch.
Aufgrund diese Vorgehensweise ist die Länge der im Rahmen einer einzelnen Fahrt zurückzulegenden Strecke normalerweise auf eine Distanz von maximal etwa 100 Metern begrenzt. Dies entspricht der Entfernung, in der die Kamerasysteme des Rovers die Umgebung in einer für die Planung einer zukünftigen Fahrt ausreichend hohen Auflösung wiedergeben können. Bei einer durch Geländeunebenheiten bedingten schlechten Sicht auf die zukünftig zu passierenden Oberflächenbereiche fallen die Fahrten dagegen entsprechend kürzer aus.
Allerdings ist der Rover in der Lage, dieses Manko auszugleichen, indem er sich nach dem ‚vorgeplanten‘ Abschnitt einer Fahrt im sogenannten ‚autonomen Navigationsmodus‘ weiterbewegt. Hierbei unterbricht der Rover seine Fahrt in regelmäßigen Abständen von maximal wenigen Metern und fertigt mit seinen Gefahrenerkennungs- und Navigationskameras Fotoaufnahmen des vorausliegenden Geländes an.
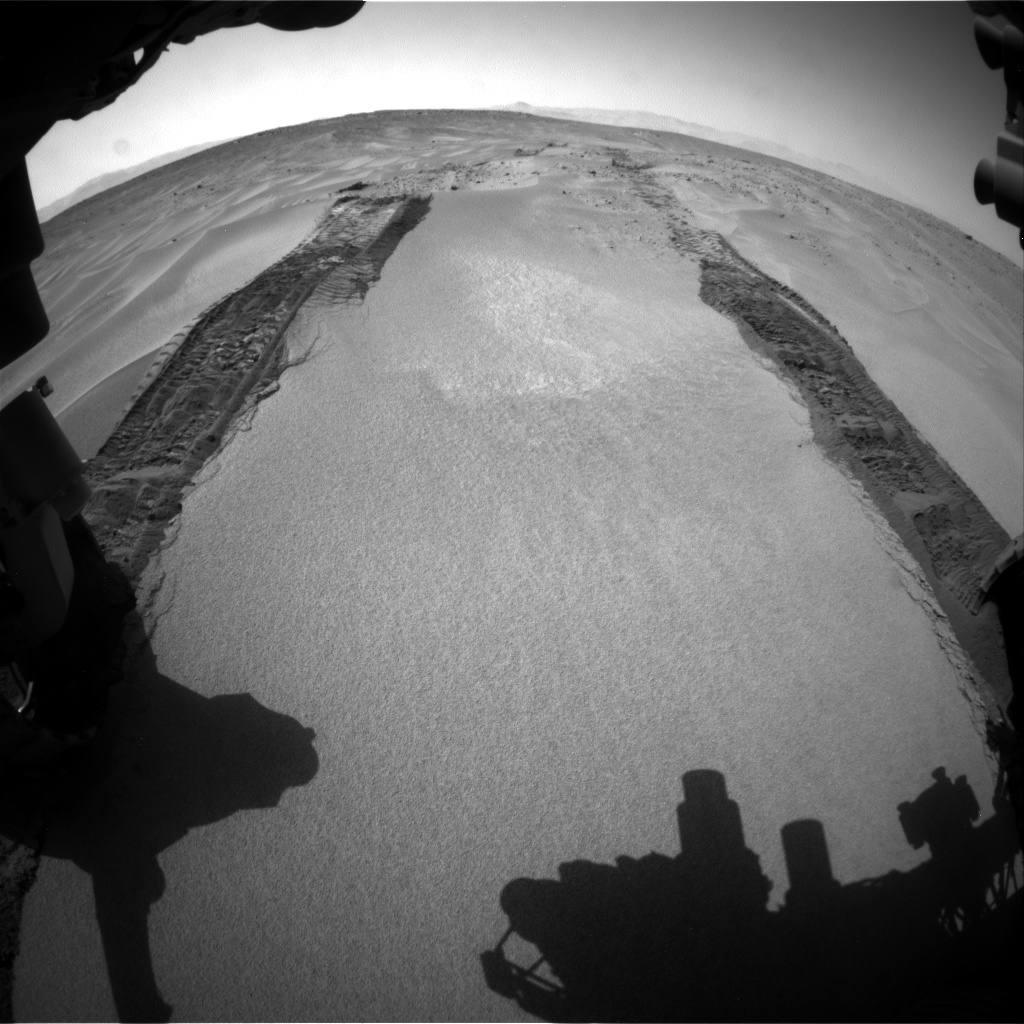
(Bild: NASA, JPL-Caltech)
Jeweils zwei Kameras bilden dabei zeitgleich den gleichen Geländeabschnitt ab. Diese Aufnahmen werden von der ‚Drive-Software‘ des Rovers zu Stereoaufnahmen kombiniert – im Gegensatz zu konventionellen 2D-Aufnahmen ergibt sich bei stereoskopischen Aufnahmen auch ein räumlicher Eindruck der Landschaft – und anschließend autonom ausgewertet. Aus den so gewonnenen Informationen berechnet die Software von Curiosity anschließend einen sicheren Weg zu dem vorgegebenen Endpunkt der Tagesetappe.
Eine Sanddüne stoppt die Fahrt
Auf diese Weise überbrückte Curiosity am 25. und 26. Juni 2014 im Rahmen von zwei in die südliche Richtung zielenden Fahrten insgesamt weitere 224 Meter. Für den folgenden Tag war dann eine weitere Fahrt über diesmal 101 Meter geplant, welche über einen weitgehend mit Sand bedeckten Bereich der Marsoberfläche führen würde. Nach einer absolvierten Strecke von 82 Metern brach Curiosity diese Fahrt allerdings automatisch ab, da die ‚Drive-Software‘ ein unvorhergesehenes Problem registriert hatte.
Die Stereoaufnahmen der Gefahrenerkennungs- und Navigationskameras werden nicht nur genutzt, um den nächsten Teilabschnitt einer Fahrt zu ermitteln. Vielmehr dienen diese Aufnahmen auch dazu, um regelmäßig zu überprüfen, ob der Rover auf dem vorherigen Abschnitt der Fahrt eventuell von der vorgesehenen Route ‚abgedriftet‘ ist oder nicht den vorgesehenen Geländegewinn erzielt hat. Stimmt die ‚berechnete‘ Position nicht mit der wirklich erreichten Position überein und wird dabei eine zuvor von den Roverdrivern vorgegebene ‚Toleranzschwelle‘ überschritten, so hat dies einen automatisch erfolgenden Abbruch der Fahrt zur Folge.
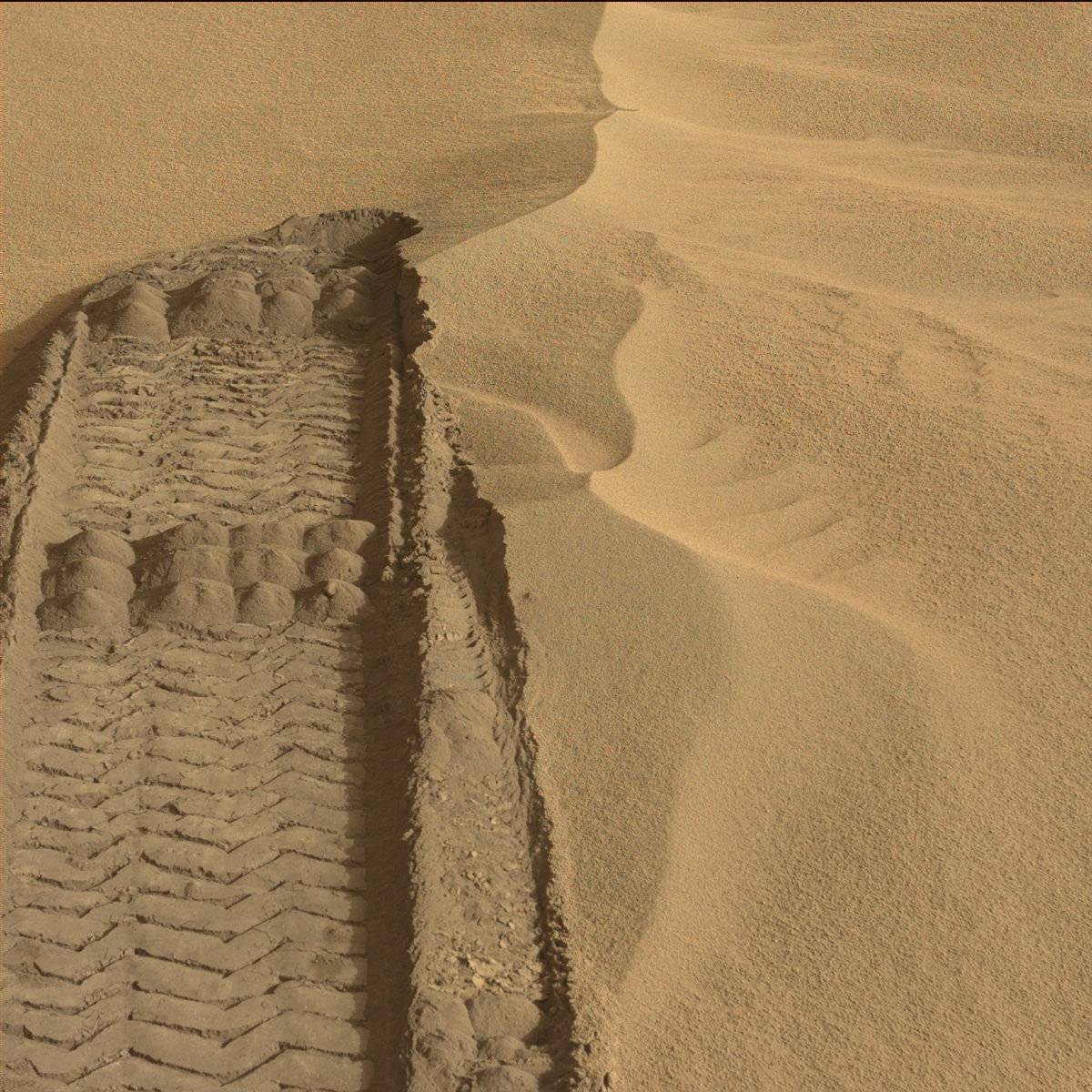
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Genau dieser Fall trat dann auch im Rahmen der Fahrt vom 27. Juni ein. Die Software stellte fest, dass Curiosity beim Überfahren einer kleinen Sanddüne nicht den erwarteten Geländegewinn erzielt hatte. Dank des frühzeitigen Erkennens dieser potentiellen Gefahr führte dieser Schlupf allerdings nicht dazu, dass sich die Räder des Rovers in den lockeren Untergrund eingraben konnten.
Vergleichbare Situationen haben in der Vergangenheit mehrfach zu Problemen bei den Missionen der Marsrover Opportunity und Spirit geführt. Für Spirit bedeutete das Einsinken in einer ‚Sandfalle‘ letztendlich sogar das Ende der Mission (Raumfahrer.net berichtete). Auch aus diesem Grund gingen die an der Curiosity-Mission beteiligten Wissenschaftler und Ingenieure äußerst sorgfältig vor, als der Rover im Februar 2014 eine Sanddüne überqueren musste (Raumfahrer.net berichtete).
Nach der Auswertung der Telemetriedaten, welche den Grund für den Abbruch der Fahrt am 27. Juni dokumentierten, wurde der Rover am 29. Juni zunächst um etwa neun Meter zurückbewegt. Anschließend wurde die jetzt wieder vor dem Rover liegende Düne, welche inzwischen mit dem Namen ‚Sourdough‘ belegt wurde, intensiv mit den Kamerasystemen abgebildet. Nochmals zwei Tage später setzte Curiosity die Fahrt fort, indem dieser Bereich der Marsoberfläche in westlicher Richtung ‚umfahren‘ wurde.
Allerdings entsprach auch der dabei erreichte Geländegewinn von rund 22 Metern nicht den vorgesehenen Erwartungen – geplant war eine Fahrt über mindestens 39 Meter. Diesmal verantwortlich für den vorzeitigen Abbruch der Fahrt war eine nach dem Abschluss einer Teiletappe über den Parametervorgaben liegende Abweichung in der Azimut-Orientierung des Rovers in Bezug auf die Marsoberfläche.
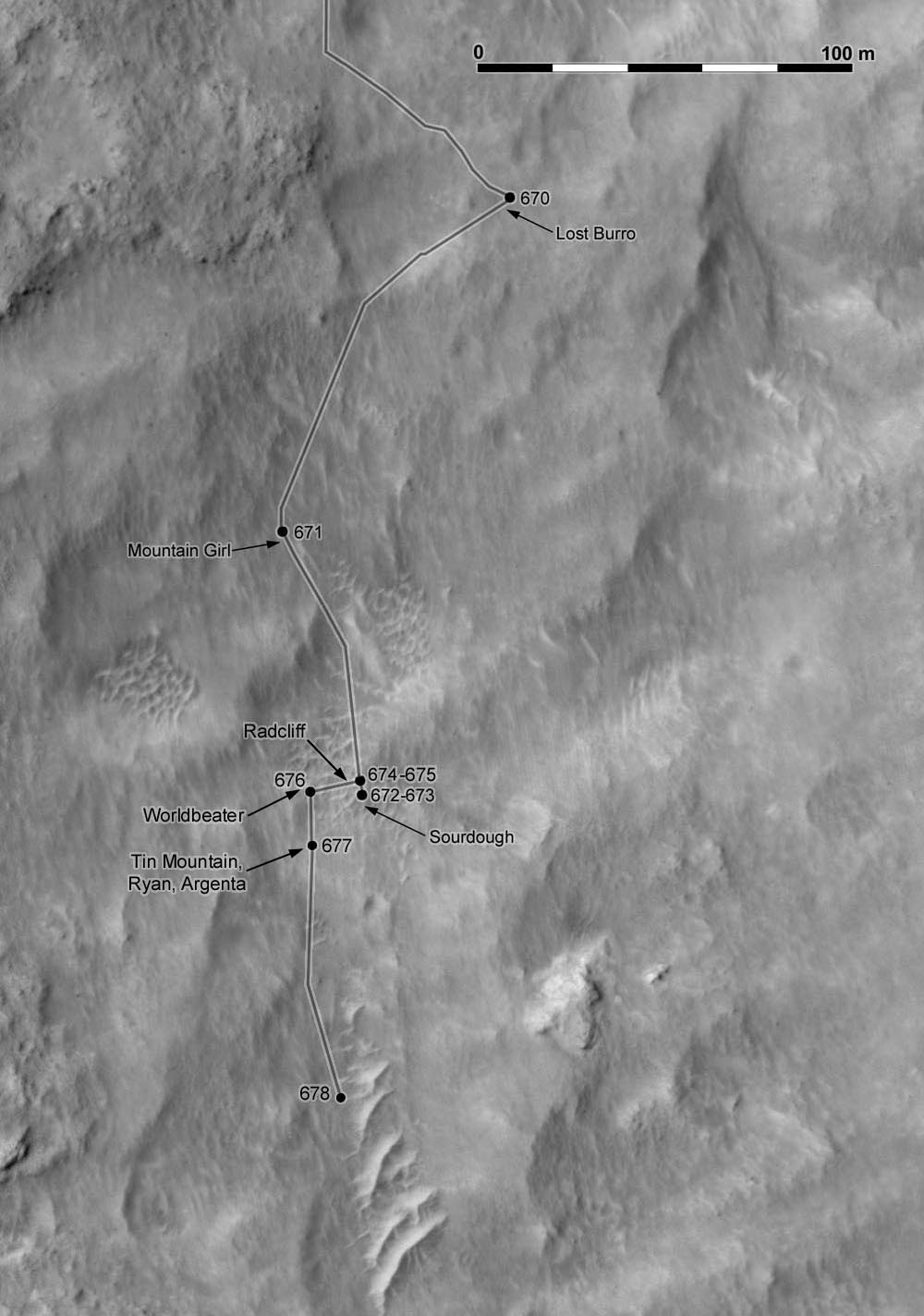
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Auch die darauf folgende Fahrt am 2. Juli wurde nach lediglich 21 Metern – geplant waren diesmal eigentlich 57 Meter – vorzeitig beendet. Diesmal war ein mehr als 20 Zentimeter hoher Felsbrocken der Auslöser für den Abbruch der Fahrt, welcher dem Rover den vorgesehenen Weg versperrte.
Prinzipiell ist Curiosity dazu ausgelegt, bis zu 75 Zentimeter hohe Hindernisse und Geländeneigungen von im Normalfall 30 Grad, in Extremfällen sogar von bis hin zu maximal 45 Grad zu bewältigen. Aufgrund des gegenwärtig gegebenen sandigen und entsprechend lockeren Untergrundes sind die entsprechenden Sicherheitsparameter derzeit allerdings bewusst konservativ eingestellt.
Dies konnte den Rover allerdings nicht daran hindern, am 3. Juli weitere 72 Meter in ebenfalls die südliche Richtung zurückzulegen. Der 4. Juli wurde dann genutzt, um die sechs Räder einer erneuten intensiven Inspektion zu unterziehen, wobei die Kamerasysteme zum Einsatz kamen.
Bis zum heutigen Tag, dem „Sol“ 681 seiner Mission, hat der Marsrover Curiosity rund 8.500 Meter auf der Marsoberfläche zurückgelegt. Dabei hat der Rover mit seinen Kamerasystemen inzwischen über 164.200 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: