Aufgrund der seit Anfang August aufgetretenen Probleme mit einem sandigen Untergrund mussten die Pläne für den Marsrover Curiosity kurzfristig geändert werden. Statt die Fahrt auf der vorgesehenen Route fortzusetzen soll jetzt zunächst die außerplanmäßige Untersuchung einer Gesteinsformation erfolgen. Hierbei soll unter anderem auch der Gesteinsbohrer des Rovers zum Einsatz kommen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: USGS, JPL, UMSF.
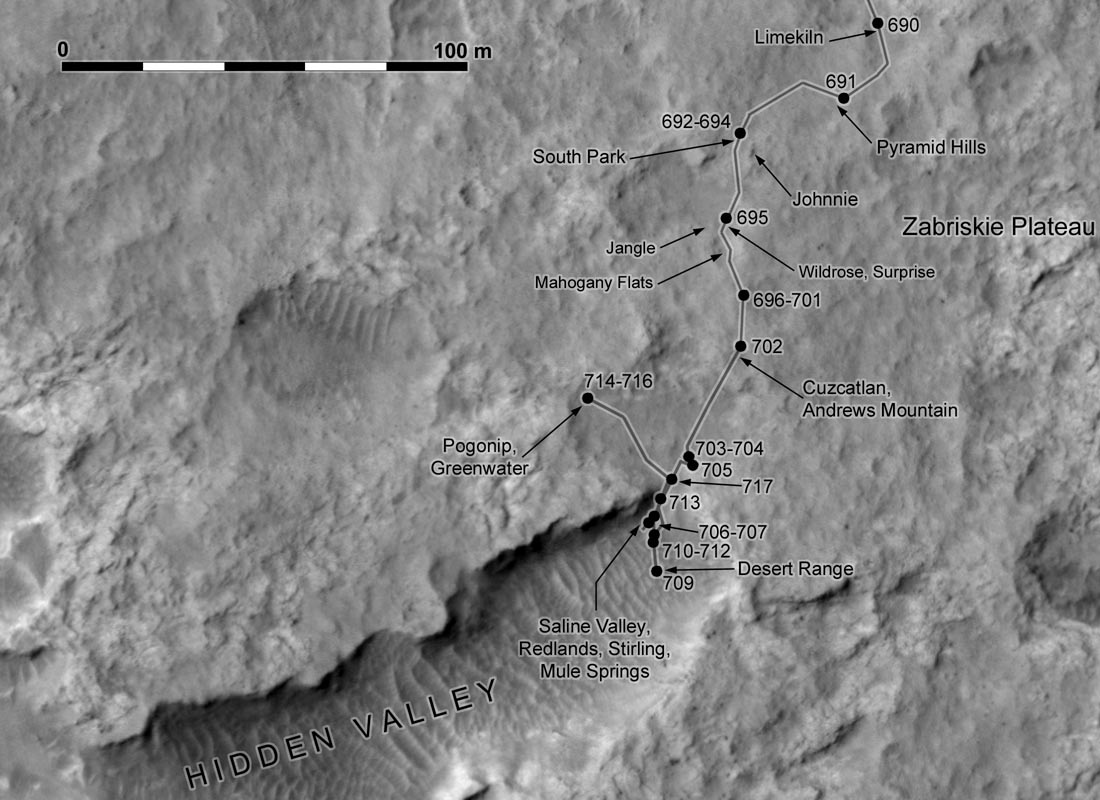
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Auf seinem Weg zu der Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons sollte der von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsrovers Curiosity im August zwei kleine Täler durchqueren und anschließend die noch knappe 500 Meter vom aktuellen Standort entfernt gelegene Region „Pahrump Hills“ erkunden. Bei der Einfahrt in das „Hidden Valley“, dem ersten der beiden Täler, zeigte sich jedoch, dass die Räder des Rovers aufgrund des sandigen und somit sehr lockeren Untergrundes und dem damit verbundenen hohen Schlupf einen deutlich geringeren Geländegewinn erzielten als beabsichtigt. Aus diesem Grund entschlossen sich die für die Steuerung von Curiosity verantwortlichen Roverdriver am Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien dazu, das „Hidden Valley“ am vergangenen Wochenende wieder zu verlassen (Raumfahrer.net berichtete).
Das Hidden Valley – zu ‚tiefer‘ Sand
Die Probleme mit dem von einer Vielzahl an kleinen Sanddünen bedeckten Untergrund wurden als so gravierend eingestuft, dass die für die Planung der Curiosity-Mission verantwortlichen Mitarbeiter der NASA ihre ursprünglichen Pläne mittlerweile geändert haben. Statt die Region „Pahrump Hills“ im Rahmen einer direkten Durchquerung des „Hidden Valley“ zu erreichen soll der Rover bereits jetzt an seinem derzeitigen Standort eine ausführliche Analyse der hier befindlichen Gesteine durchführen.
Am 9. August 2014, dem „Sol“ 714 seiner Mission, bewegte sich Curiosity im Rahmen einer weiteren Fahrt über rund 37,5 Meter zunächst in die nordwestliche Richtung. An der jetzt erreichten Position nördlich der Einfahrt in das „Hidden Valley“ wurden aus einer leicht erhöhten Lage heraus Aufnahmen des vorausliegenden Gebietes angefertigt, welche für die Planung der zukünftigen Route und der weiteren Vorgehensweise erforderlich sind. Sehr wahrscheinlich ist dabei zum jetzigen Zeitpunkt, dass das „Hidden Valley“ bei der Weiterfahrt von Curiosity an dessen nördlichen Rand umfahren wird.
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Am 12. August begab sich der Rover jedoch zuerst erst einmal wieder zu dem ‚Einstiegspunkt‘ in das Tal. Aus der jetzt erreichten Position heraus wurde neben den verschiedenen Kamerasystemen auch die ChemCam dazu eingesetzt, um auf dem unmittelbar vor dem Rover befindlichen Gelände mögliche Ziele für eine ausführliche ‚in situ‘-Untersuchung auszuwählen.
Bonanza King – das nächste Untersuchungsziel
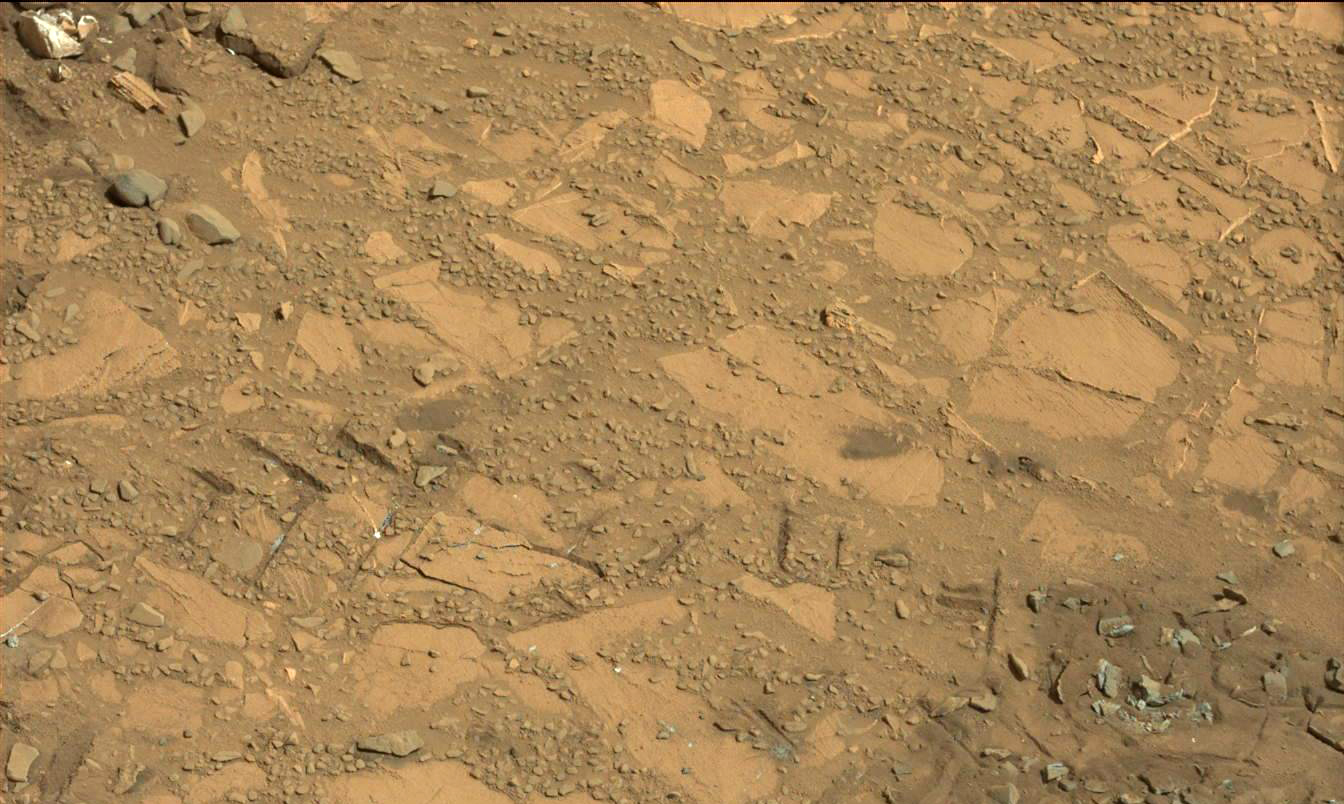
Diese Wahl fiel schließlich auf eine mit dem Namen „Bonanza King“ belegte Gesteinsformation. Hierbei handelt es sich um eine von mehreren etwa tellergroßen flachen Felsplatten, welche sich direkt auf der Einfahrt in das „Hidden Valley“ befinden und die von dem Rover bereits während der ersten Einfahrt in das Tal überquert wurden. Diese Gesteine unterscheiden sich deutlich von den Sandsteinen, welche Curiosity in den vergangenen Monaten untersucht hatte.
Die deutlich hellere Farbe dieser Platten und ihre Lage in den geologischen Schichtformationen deutet zudem darauf hin, dass sie den Gesteinen ähneln, welche ursprünglich erst in der Region „Pahrump Hills“ erkundet werden sollten, und die in einem direkten geologischen Zusammenhang mit den Gesteinsschichten an der Basis des Zentralberges Aeolis Mons stehen.
„Aus geologischer Sicht betrachtet besteht eine Verbindung zwischen Bonanza King und Pahrump Hills. Eine Untersuchung an der hiesigen Stelle bietet uns die Möglichkeit zu verstehen, wie sich diese Gesteine in das Gesamtbild des Gale-Kraters und des Mount Sharp einfügen“, so Dr. Ashwin Vasavada, der stellvertretende Projektwissenschaftler der Curiosity-Mission am JPL.

(Bild: NASA, JPL-Caltech)
Am 14. August bewegte sich Curiosity im Rahmen einer kurzen Fahrt über 3,7 Meter noch etwas weiter auf „Bonanza King“ zu, so dass dieses Ziel jetzt in der direkten Reichweite der zwei am Instrumentenarm des Rovers befindlichen Instrumente, dem APX-Spektrometer und der MAHLI-Kamera, befindet. Sofern sich im Rahmen der Analyse der im Rahmen dieser bisher letzten Fahrt gewonnenen Daten herausstellt, dass alle sechs Räder des Rovers über festen Bodenkontakt verfügen, sollen diese Instrumente in der kommenden Woche eingesetzt werden, um „Bonanza King“ einer eingehenden Untersuchung zu unterziehen.
Durch das für den Einsatz der Instrumente für eine direkte Bodenuntersuchung notwendige Entfalten des Instrumentenarmes erfolgt automatisch eine Gewichtsverlagerung des Rovers, was unter bestimmten Umständen dazu führen könnte, dass der Rover im Rahmen dieses Manövers aufgrund eines unebenen oder ’nicht standsicheren‘ Untergrundes ins Rutschen gerät. Dieses definitiv unerwünschte Szenario – ein ‚Rutschen‘ könnte zur Folge haben, dass die Instrumente ungewollt auf der Oberfläche aufsetzen und dabei beschädigt werden – kann zum Beispiel dann eintreten, wenn eines der sechs Räder des Rovers auf der Kante eines größeren Steins zum Stehen gekommen ist oder der Boden mehr oder weniger stark geneigt und zudem von einer lockeren Sandschicht bedeckt wird.
Eine weitere Bohrung ist geplant
Sofern die Roverdriver ihr ‚Okay‘ für den Einsatz des Instrumentenarmes geben soll im Rahmen dieser Analysen dann auch erneut der Gesteinsbohrer von Curiosity zum Einsatz gebracht werden und eine weitere Bohrung durchführen. Das dabei zu gewinnende pulverförmige Material soll anschließend zunächst mit dem Bodenprobenaufbereitungssystem CHIMRA (kurz für „Collection and Handling for Interior Martian Rock Analysis“) aufbereitet und gesiebt werden. Anschließend werden Teile der so präparierten Bodenprobe an die beiden im Inneren des Rovers befindlichen Instrumentenkomplexe SAM und CheMin weitergeleitet. Diese Analyseinstrumente sollen dann die chemische und mineralogische Zusammensetzung des zu untersuchenden Materials ermitteln.
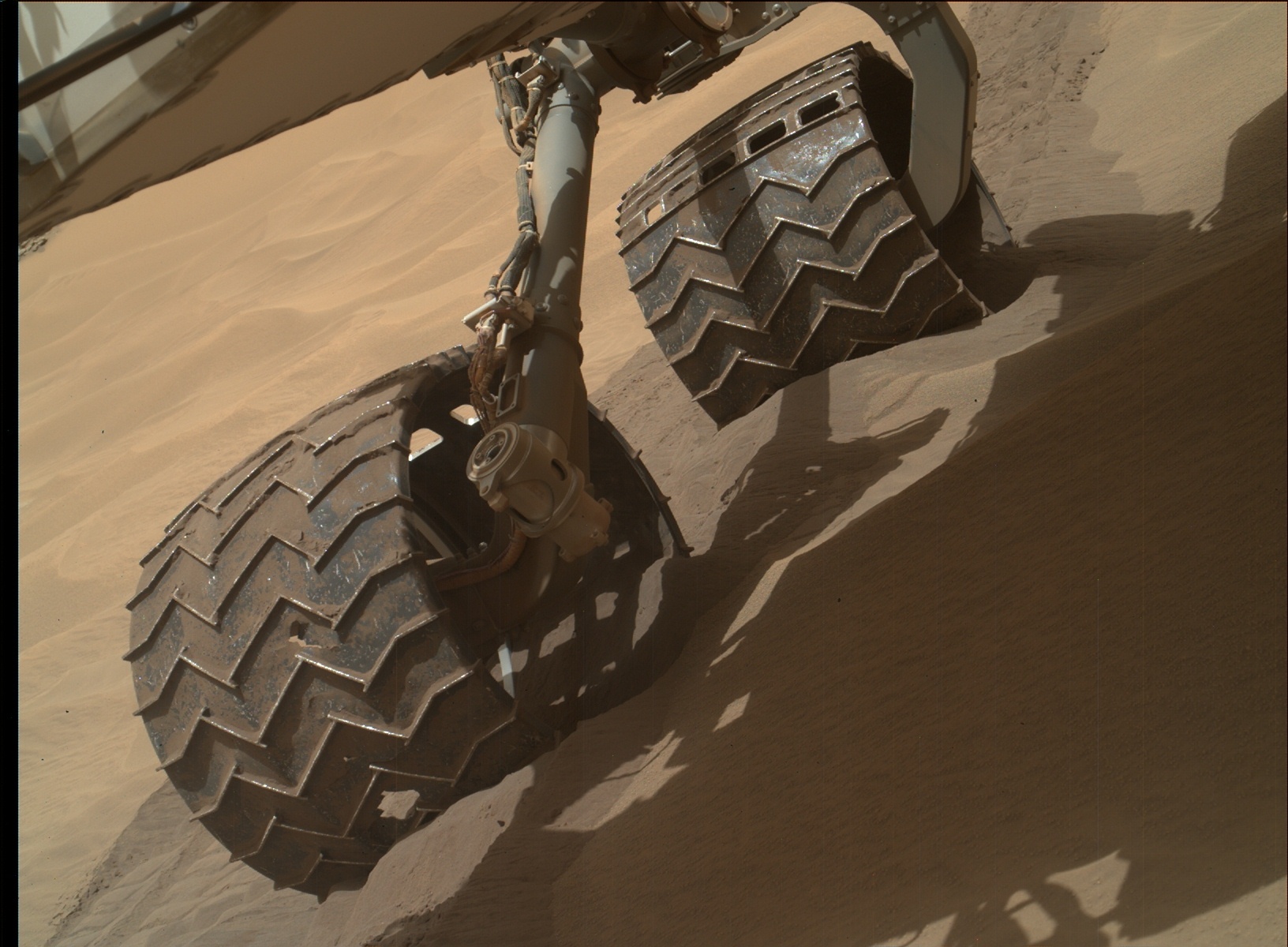
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Ein kompaktes Wochenendprogramm
Während des jetzigen Wochenendes werden allerdings zunächst verschiedene ‚Fernerkundungen‘ der Umgebung erfolgen. Die Kamerasysteme bilden dabei verschiedene Bereiche der Oberfläche zu unterschiedlichen Tageszeiten ab, um eventuell durch veränderte Beleuchtungsverhältnisse bedingte optische Veränderungen zu charakterisieren. Die MastCam soll zudem die Sandrippel im Inneren des „Hidden Valley“ dokumentieren. Die Navigationskamera des Rovers wird dagegen speziell dazu eingesetzt, um am Himmel über dem Gale-Krater nach Wolkenformationen Ausschau zu halten. Außerdem soll mit diesem Kamerasystem die Suche nach eventuell auftretenden Staubteufeln– so genannten ‚Dust Devils‘ – fortgesetzt werden.
Zur Charakterisierung der chemischen Zusammensetzung der lokalen geologischen Formationen wird die ChemCam mehrere Oberflächenziele mit ihrem Laser und dem „Remote Micro Imager“-Teleskop anpeilen. Des weiteren werden die Instrumente REMS, RAD und DAN ihre üblichen Routinemessungen zur Charakterisierung der örtlichen Umweltbedingungen durchführen.
Bis zum heutigen Tag, dem Sol 721 seiner Mission, hat der Marsrover Curiosity rund 8.700 Meter auf der Marsoberfläche zurückgelegt. Dabei hat der Rover mit seinen Kamerasystemen inzwischen 177.993 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: