Nach einer eingehenden Analyse der gegebenen Oberflächenbedingungen haben sich die Mitarbeiter der Curiosity-Mission dazu entschlossen, eine für diese Tage geplante Bohrung aufgrund der instabilen Oberfläche nicht durchzuführen und stattdessen die Fahrt zu dem Zentralberg des Gale-Kraters fortsetzen.
Ein Beitrag von Ralph-Mirko Richter. Quelle: USGS, JPL, University of Leicester.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Eigentlich sollte der von der US-amerikanischen Weltraumbehörde NASA betriebenen Marsrovers Curiosity während der vergangenen Woche sein Bohrsystem dazu einsetzen, um eine mit dem Namen „Bonanza King“ belegte Gesteinsformation anzubohren. Das dabei gewonnene Material sollte anschließend mit den Instrumenten des Rovers eingehend analysiert werden (Raumfahrer.net berichtete). Leider hat sich jedoch in den letzten Tagen herausgestellt, dass „Bonanza King“ für eine solche Bohrung nicht geeignet ist. Deshalb wird Curiosity seine Fahrt jetzt fortsetzen.
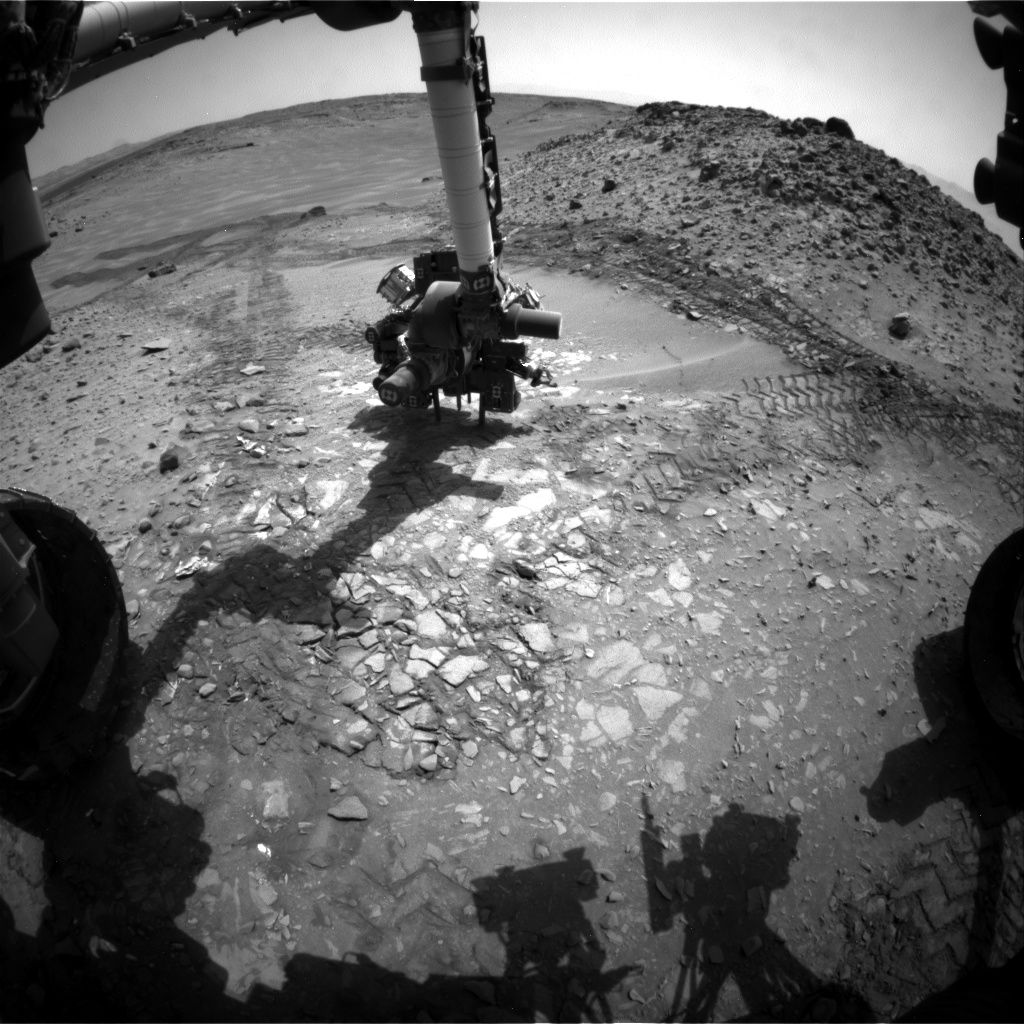
Neben den verschiedenen Kamerasystemen des Rovers kamen am 17. August 2014 auch das APX-Spektrometer und die MAHLI-Kamera zum Einsatz, um das für die anstehende Bohrung ausgewählte Ziel näher zu untersuchen. Außerdem wurde das „Dust Removal Tool“ (kurz „DRT“) auf der Oberfläche platziert und anschließend aktiviert. Bei dem DRT handelt es sich um eine aus Edelstahlborsten bestehende Bürste, mit der die zu untersuchenden Gesteinsformationen von der obersten Staubschicht befreit werden können.
Eine solche Staubschicht, welche unter Umständen seit Jahrmillionen den auf der Marsoberfläche auftretenden Umweltbedingungen – einschließlich der einfallenden kosmischen Strahlung – ausgesetzt war, könnte zum Beispiel die Messergebnisse des APX-Spektrometers verfälschen. Im Operationsbetrieb wird die Bürste auf dem zu reinigenden Oberflächenbereich aufgesetzt und durch einen Motor in eine rotierende Bewegung versetzt. Der dabei von einer Staubschicht zu ‚reinigende‘ Bereich der Marsoberfläche weist einen Durchmesser von mindestens 45 Millimetern auf.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Testbohrung: „Bonanza King“ ist nicht geeignet
Am 20. August erfolgte dann eine erste ‚Testbohrung‘, in deren Verlauf der Bohrer des Rovers eine lediglich nur wenige Millimeter tief in den Stein reichende Bohrung durchführen sollte. In einem nächsten Schritt sollte dann zwei Tage später eine vollständige, etwa sechs Zentimeter in die Tiefe reichende Bohrung durchgeführt werden. Die Auswertung der im Rahmen dieser „Mini-Drill“-Bohrung gewonnenen Daten zeigte allerdings, dass diese Bohrung vorzeitig automatisch abgebrochen wurde, weil sich der Felsen bereits unmittelbar nach dem Beginn der Bohrung unter der mechanischen Einwirkung des Bohrers leicht seitlich bewegt hatte. Diese ‚Verschiebung‘ des angepeilten Zieles führte zu einem erhöhten Widerstand, welcher den vorzeitigen Abbruch verursachte.
Dank des rechtzeitigen Abbruchs der Bohrung traten dabei laut Dr. John Bridges von der Universität Leicester/England keine Beschädigungen an dem Bohrsystem auf. Die Formation „Bonanza King“ ist jedoch offenbar deutlich weniger stark mit dem Untergrund verbunden als zuvor erwartet, so der Wissenschaftler weiter. Somit war es zunächst auch unklar, ob Curiosity unter diesen Bedingungen das Risiko einer ‚vollständigen‘ Bohrung eingehen soll.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems. Animation: Raumfahrer.net)
Durch den unsicheren Untergrund bestand die Gefahr, dass sich der Bohrer bei seiner Arbeit festfrisst, was sowohl zu Beschädigungen des eigentlichen Bohrsystems als auch des gesamten Instrumentenarmes des Rovers, an dem der Bohrer befestigt ist, führen könnte.
Nach ausführlichen Diskussionen über die weitere Vorgehensweise entschieden sich die Mitarbeiter der Curiosity-Mission am vergangenen Freitag dazu, weder bei „Bonanza King“ noch bei einer der anderen in der unmittelbaren Umgebung gelegenen Gesteinsformationen eine vollständige Bohrung durchzuführen.
„Wir sind zu dem Beschluss gelangt, dass die [dort befindlichen] Felsen keine guten Ziele für Bohrungen darstellen“, so Jim Erickson, der Projektmanager der Curiosity-Mission vom Jet Propulsion Laboratory (JPL) der NASA in Pasadena/Kalifornien.
Statt einer Bohrung soll deshalb die Fahrt zu dem im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons fortgesetzt werden. Dieser Weg wird allerdings nicht, wie ursprünglich vorgesehen, direkt durch das „Hidden Valley“ – einem direkt vor dem Rover gelegenen Tal – führen. Die dort befindliche Oberfläche aus feinem Sand und diversen Dünen wurde bereits vor zwei Wochen als ’nur unter großen Risiken passierbar‘ eingestuft (Raumfahrer.net berichtete).
(Bild: NASA, JPL-Caltech)
Weiterfahrt am heutigen Tag
Stattdessen wird der Rover zunächst einen Kurs einschlagen, welcher unmittelbar am nördlichen Rand des „Hidden Valley“ verlaufen soll. Die erste Fahrt nach dem Verlassen von „Bonanza King“ wird am heutigen 24. August 2014, dem „Sol“ 729 der Curiosity-Mission, erfolgen und in etwa 10 Stunden beginnen. Für den morgigen Tag sind dann neben den üblichen Fotoaufnahmen verschiedene Routinemessungen vorgesehen, bei denen unter anderem die abbildenden Instrumente sowohl die Marsoberfläche als auch die Atmosphäre dokumentieren werden.
Bisher hat der Marsrover Curiosity rund 8.800 Meter auf der Marsoberfläche zurückgelegt. Dabei hat der Rover mit seinen Kamerasystemen inzwischen 179.940 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: