Nach dem Passieren einer Sanddüne bewegt sich der Marsrover Curiosity derzeit auf einem relativ leicht zu passierenden Gelände. Mitte der Woche wurden dabei im Rahmen von zwei Fahrten, welche diesmal im Rückwärtsgang absolviert wurden, weitere 200 Meter überbrückt.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS.
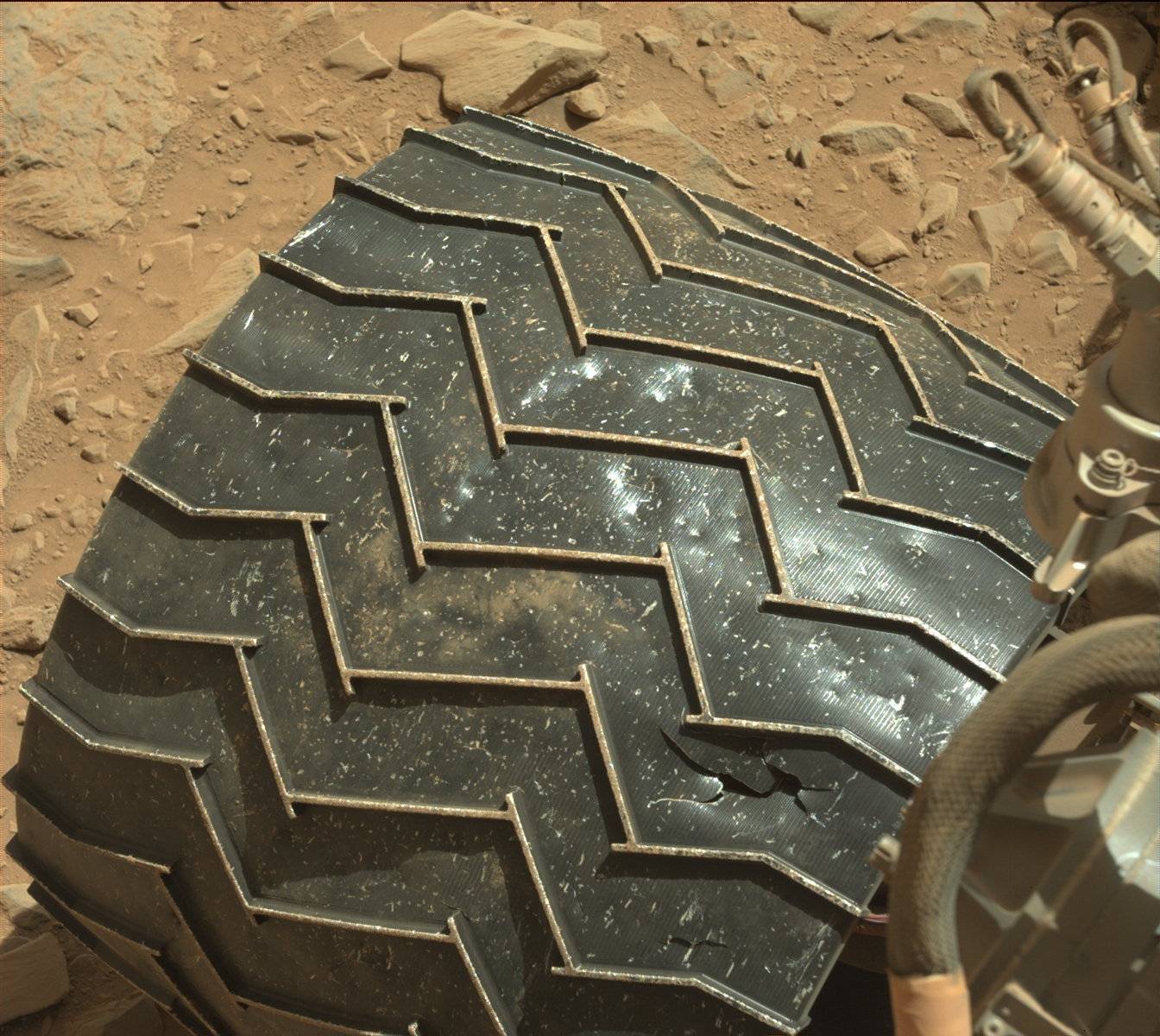
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Zur Fortbewegung über die Marsoberfläche ist der von der US-amerikanischen Weltraumbehörde NASA betriebene Marsrover Curiosity mit sechs Rädern ausgestattet. Jedes dieser Räder verfügt über einen Durchmesser von 51 Zentimetern und eine Breite von 40 Zentimetern. Die lediglich 0,75 Millimeter starken Laufflächen dieser Räder, auf denen das gesamte Gewicht des 899 Kilogramm schweren Rovers lastet, bestehen aus einer Aluminiumlegierung und sind mit verschiedenen Querrippen an den Oberseiten und Ringen an den Innenwänden verstärkt.
Bereits im Rahmen der ausführlichen Tests, welche im Vorfeld der Mission auf der Erde durchgeführt wurden, zeigte sich dass diese Räder bei ihrem Einsatz auf dem Mars nach einer gewissen Zeit verschiedene Beschädigungen wie zum Beispiel Dellen, aber auch Löcher und Risse aufweisen würden. Diese zu erwartenden Beschädigungen wurden von den für die Planung der Mission verantwortlichen Ingenieuren der NASA als für die Mission nicht bedrohlich eingeschätzt. Auch mit erheblich beschädigten Laufflächen, so zum Beispiel Matt Heverly, der Leiter des Roverdriver-Teams, welches für die Steuerung des Rovers verantwortlich ist, wird Curiosity auch weiterhin in der Lage sein, seine Fahrt fortzusetzen.
Und tatsächlich – schon nach wenigen Fahrten über die Marsoberfläche zeigten sich bereits im Jahr 2012 auf den Laufflächen der Räder einzelne Kratzer und Dellen. Während der letzten Monate bildeten sich zudem verschiedene Löcher und teilweise mehrere Zentimeter lange Risse. Diese zuletzt vermehrt auftretenden Abnutzungserscheinungen resultieren laut den Einschätzungen der in die Mission eingebundenen Techniker und Ingenieure daraus, dass Curiosity speziell im vierten Quartal des Jahres 2013 ein Gelände überquerte, auf dessen felsigen Untergrund sich eine Vielzahl zwar nur wenige Zentimeter großer, dafür aber scharfkantiger Steine befand. Beim Überfahren dieser Steine traten dann die Mehrzahl der jetzt zu beobachtenden Beschädigungen auf.
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Ende Januar 2014 entschlossen sich die für die Durchführung der Mission verantwortlichen NASA-Mitarbeiter dazu, den Rover von seinem ursprünglich vorgesehenen Kurs abweichen zu lassen und stattdessen einer alternativen Route zu folgen. Auf der jetzt vorgesehenen Strecke befindet sich ein Gelände, auf dem sich laut den Daten des ebenfalls von der NASA betriebenen Marsorbiters Mars Reconnaissance Orbiter (MRO) deutlich weniger Steine befinden sollen.
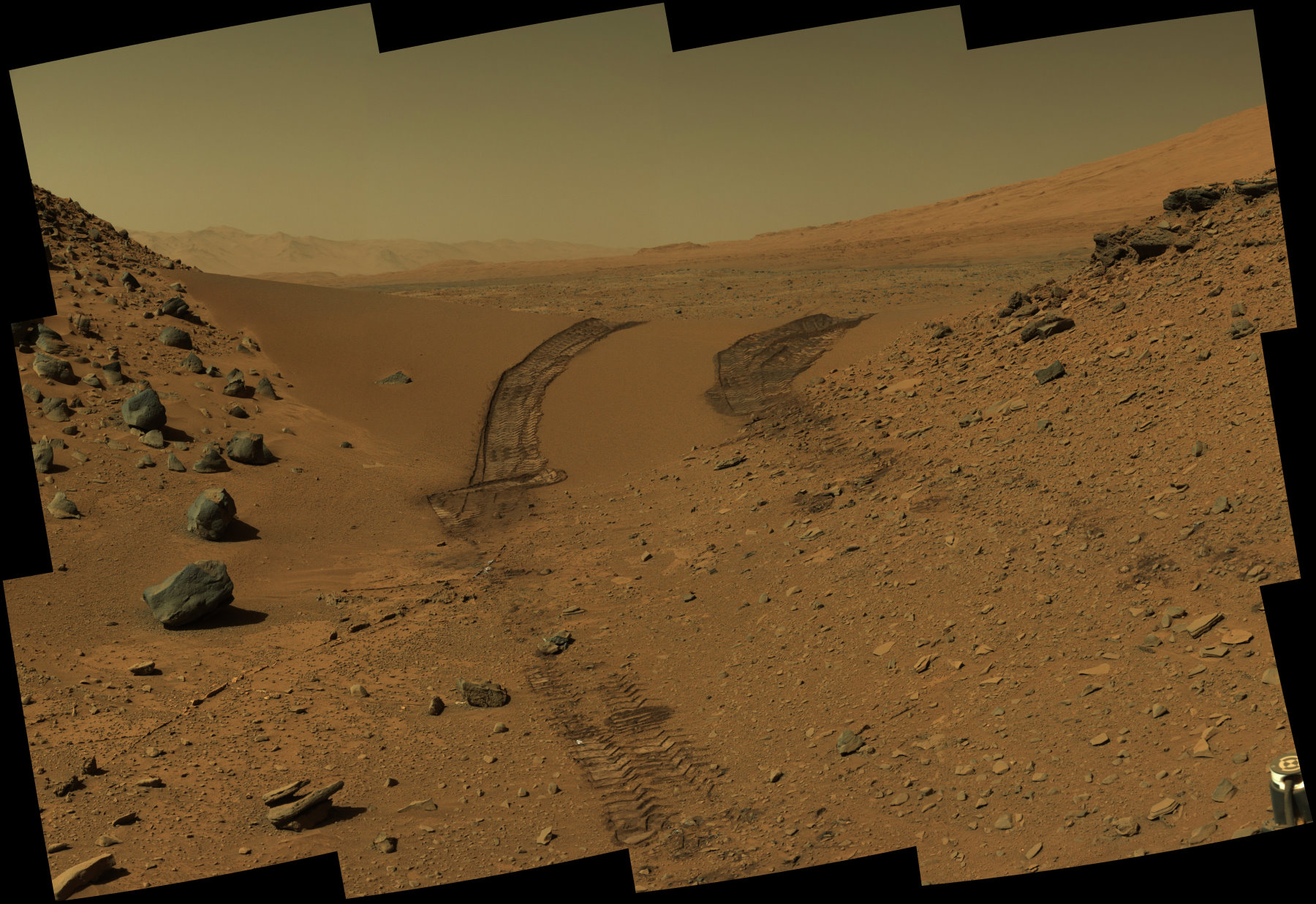
Zu Beginn der neuen Route musste der Rover allerdings zunächst eine in ihrem Zentrum etwa einen Meter hohe Sanddüne überqueren, welche die „Einfahrt“ zu den jetzt vorgesehenen Strecke auf voller Breite versperrte und die eine potentielle Gefahr für den Rover dargestellte. Curiosity überquerte diese Düne schließlich am 6. Februar problemlos (Raumfahrer.net berichtete) und setzte seine Fahrt in den folgenden Tagen fort.
Die Aufnahmen der Umgebung, welche der Rover dabei regelmäßig mit seinen Kamerasystemen anfertigt, zeigen, dass sich die Erwartungen der NASA-Mitarbeiter erfüllt haben. Curiosity bewegt sich derzeit auf einem erheblich ebeneren Gelände, welches eine deutlich geringere Anzahl an scharfkantigen Steinen aufweist als auf den vorherigen Streckenabschnitten. An den meisten Stellen ist die zu passierende Oberfläche zudem mit einer Sandschicht überzogen, was die Räder noch weiter schonen wird.

(Bild: NASA, JPL-Caltech)
Nach mehreren kürzeren Fahrten überbrückte Curiosity in den frühen Morgenstunden des 19. Februar (mitteleuropäische Zeit) schließlich innerhalb von knapp zwei Stunden eine Strecke von weiteren 100,3 Metern. Durch diese Fahrt erhöhte sich der Gesamtkilometerstand des Rovers auf einen Wert von 5,21 Kilometern, welche seit der Landung am 6. August 2012 auf der Marsoberfläche zurückgelegt wurden.
Rückwärtsgang
Diese Fahrt wurde komplett im „Rückwärtsgang“ absolviert. Die Auswertungen der Aufnahmen, welche der Rover während der letzten Monate von seinen Rädern zur Erde übermittelt hatte, haben ergeben, dass vor allem die Laufflächen der vier vorderen und mittleren Räder die besagten Beschädigungen ausweisen. Die beiden hinteren Räder zeigen dagegen einen nur geringen Verschleiß. Durch Fahrten in der Rückwärtsbewegung, so die Erwartungen der Ingenieure der NASA, lassen sich die auftretenden Beschädigungen eventuell begrenzen.
Auch die nächste Fahrt, welche am 20. Februar ebenfalls über eine Distanz von rund 100 Metern führte, wurde deshalb im Rückwärtsgang zurückgelegt. Am darauf folgenden Tag wurden die sechs Räder des Rovers erneut intensiv mit den verschiedenen Kamerasystemen abgebildet. Diese Aufnahmen sollen jetzt ausgewertet werden. Hierbei wird sich zeigen, ob sich durch Fahrten im Rückwärtsgang der Verschleiß der Laufflächen wirklich begrenzen lässt.
Derzeit befindet sich Curiosity unmittelbar vor einer mit dem Namen „Bungle Bungle“ belegten Felsformation aus offen zutage liegenden Grundgestein, welche während des jetzigen Wochenendes eingehender untersucht werden soll. Nach einer ersten Analyse mit der ChemCam wurde der Roboterarm des Rovers entfaltet und dabei zu der Formation dirigiert. Gegenwärtig sind zwei weitere der insgesamt zehn wissenschaftliche Instrumente, die an diesem Instrumentenarm montierte MAHLI-Kamera und das ebenfalls dort befindliche APX-Spektrometer, im Einsatz.
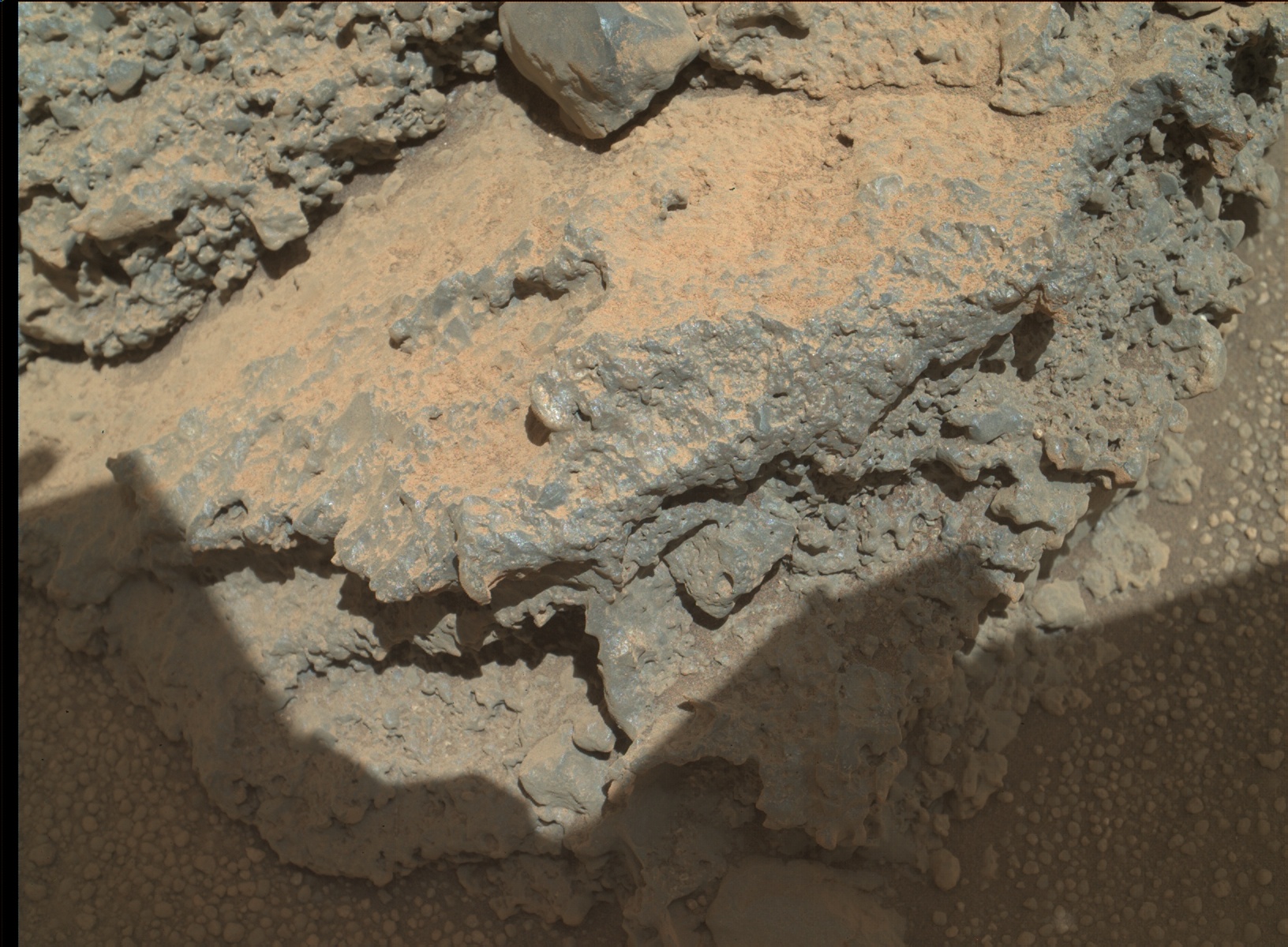
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Kurs Richtung Aeolis Mons
Nach dem Abschluss dieser Untersuchungen soll der Rover eine Strecke von weiteren rund 22 Metern zurücklegen und dann mit seinen Kameras das vorausliegende Gelände abbilden. Diese Aufnahmen sind notwendig, um zu Beginn der kommenden Woche die nächste Fahrt zu planen. Der Rover soll seine Fahrt auch weiterhin möglichst zügig fortsetzten und sich dabei der Basis des im Inneren des Gale-Kraters gelegenen und etwa 5.500 Meter hohen Zentralberges Aeolis Mons nähern. Auf dem dabei zurückzulegenden Weg wird Curiosity jedoch zunächst eine mit dem Namen „KMS-9“ belegte Region ansteuern, welche als einer der sogenannten „Waypoints“ ausgewählt wurde.
Bei diesen „Waypoints“ handelt es sich um Bereiche im Inneren des Gale-Kraters, wo Curiosity jeweils mehrtägige Stopps für ausführlichere wissenschaftliche Untersuchungen einlegen soll. Das wissenschaftliche Ziel dieser Analysen besteht darin, Informationen über die Geologie des Geländes zu sammeln, welches sich zwischen dem Landegebiet des Rovers und dem Aeolis Mons befindet. Diese Daten sollen den Wissenschaftlern dabei helfen, die zwischenzeitlich gewonnenen Informationen in einen Kontext zu den Erkenntnissen zu setzen, welche zukünftig bei den geschichteten Gesteinsablagerungen des Zentralberges erlangt werden sollen. Ein spezielles Augenmerk soll dabei auf geologische Strukturen gerichtet werden, welche offensichtlich durch fließendes Wasser erzeugt beziehungsweise verändert wurden.
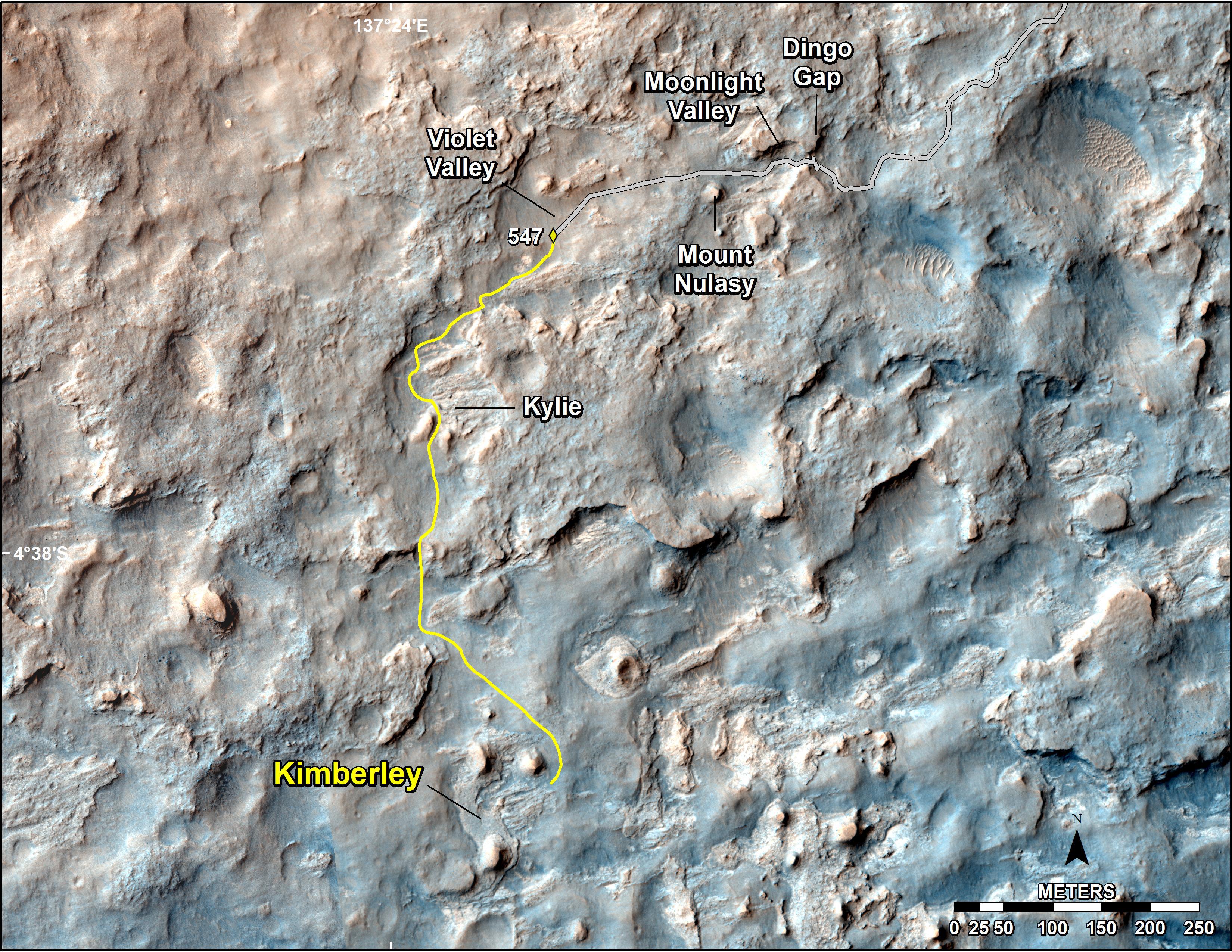
(Bild: NASA, JPL-Caltech, University of Arizona)
Bis zum Erreichen von „Kimberley“ – so wird der Waypoint „KMS-9“ mittlerweile genannt – muss der Rover allerdings noch mehrere hundert Meter zurücklegen. Im Bereich von Kimberley zeigen die Orbitaufnahmen drei verschiedene Geländetypen und eine relativ staubfreie Oberfläche. Die dortigen Formationen sollen über mehrere Tage hinweg untersucht werden. Eventuell wird dabei in der Umgebung von Kimberley auch erneut das Bohrsystem des Rovers dazu eingesetzt, um eine weitere Bodenprobe zu entnehmen und anschließend mit den Analyseinstrumenten eingehender zu untersuchen.
Inzwischen ist das Curiosity-Team zudem damit beschäftigt, anhand von Aufnahmen der Marsorbiter die zukünftige Route zur Basis des Zentralberges auszuwählen. Das Team betrachtet die zukünftig zurückzulegende Strecke inzwischen mit anderen Augen und erwägt verschiedene potentielle Routen und unterschiedliche Einstiegspunkte zur anschließenden „Besteigung“ des Aeolis Mons.
„Keine dieser Routen wird perfekt sein. Wir müssen jetzt zunächst herausfinden, welche unter diesen nicht perfekten Routen für uns optimal sein wird“, so Jim Erickson, der Projektmanager der Curiosity-Mission.
Bis zum heutigen Tag, dem „Sol“ 550 seiner Mission, hat der Marsrover Curiosity mit seinen Kamerasystemen 122.809 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Verwandte Meldungen bei Raumfahrer.net:
- Curiosity überschreitet die Fünf-Kilometer-Marke (12. Februar 2014)
- Marsrover Curiosity setzt seine Untersuchungen fort (8. Februar 2014)
- Curiosity hat die Sanddüne überquert (7. Februar 2014)
- Marsrover Curiosity hat Dingo Gap erreicht (1. Februar 2014)
- Marsrover Curiosity ändert den Kurs (25. Januar 2014)
- Marsorbiter MRO fotografiert Curiositys Radspuren (10. Januar 2014)
- Curiosity: Software-Upgrade und Überprüfung der Räder (22. Dezember 2013)
Diskutieren Sie mit in Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: