Der Marsrover Curiosity hat am 30. Januar 2014 die Dingo Gap erreicht. Vor dem Durchfahren dieser Formation wird jedoch zunächst noch eine Sanddüne untersucht, welche ein potentielles Risiko für den Rover darstellen könnte. Erst in den nächsten Tagen soll über die weitere Vorgehensweise entschieden werden.
Ein Beitrag von Ralph-Mirko Richter. Quelle: JPL, USGS. Vertont von Peter Rittinger.
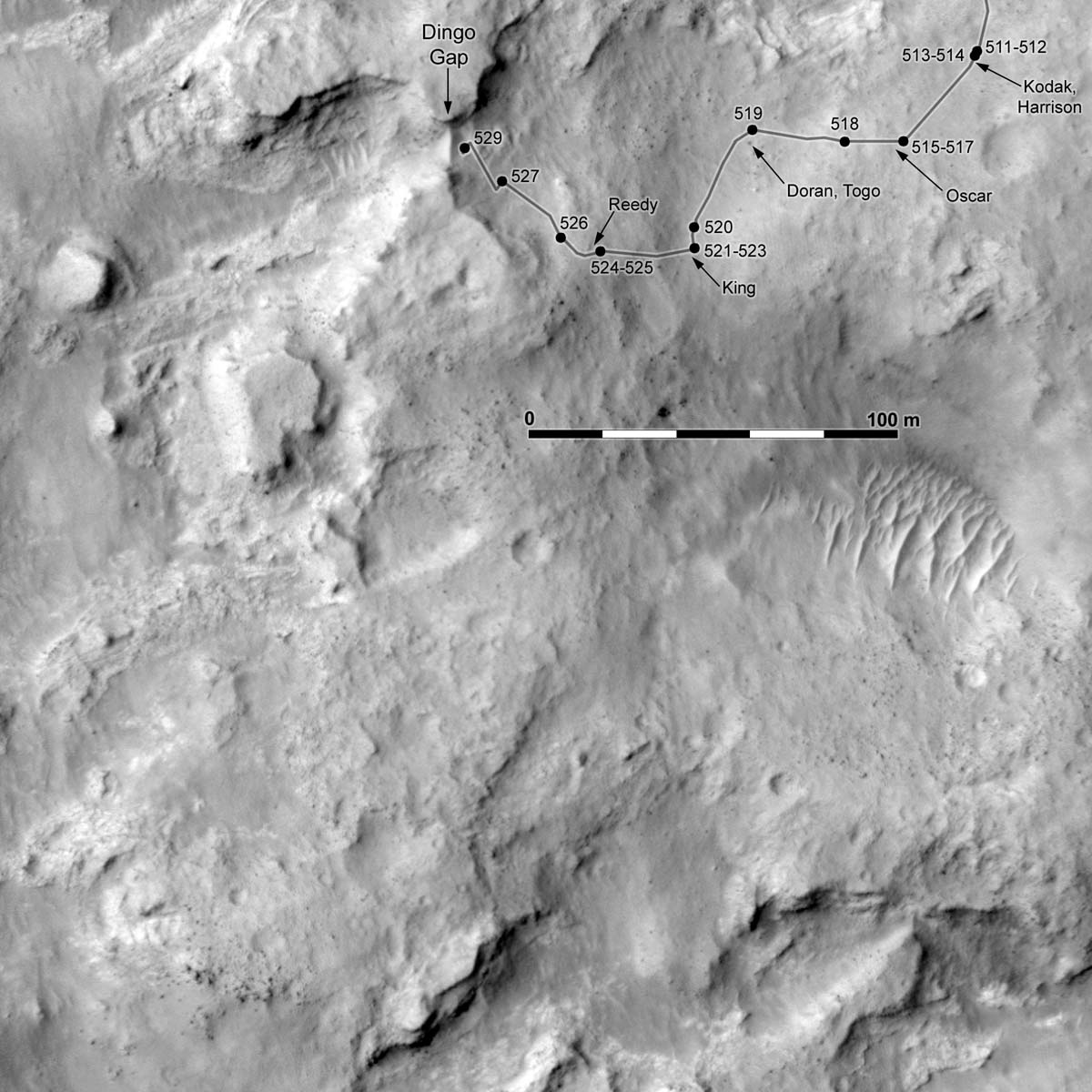
(Bild: NASA, JPL-Caltech, University of Arizona, Phil Stooke (UMSF-Forum))
Bereits vor mehr als einer Woche haben sich die Mitarbeiter der US-amerikanischen Weltraumbehörde NASA, welche für die Durchführung der Mission des Marsrovers Curiosity verantwortlich sind, dazu entschieden, den Rover von seinem ursprünglich vorgesehenen Kurs abweichen zu lassen und stattdessen eine mit dem Namen „Dingo Gap“ belegte Formation anzusteuern (Raumfahrer.net berichtete). Als Grund für diese kurzfristige Neuplanung der Route, welche als Fernziel allerdings auch weiterhin die Basis des im Inneren des Gale-Kraters gelegenen Zentralberges Aeolis Mons zum Ziel hat, wird das zukünftig zu passierende Gelände genannt. Hinter „Dingo Gap“, so die für die Planung verantwortlichen Missionsmitarbeiter, befindet sich ein Gelände, welches für den Rover leichter und sicherer zu passieren sein wird als das Terrain auf der ursprünglich vorgesehenen Route.
Abnutzung der Radlaufflächen
Zur Fortbewegung über die Marsoberfläche ist Curiosity mit sechs Rädern ausgestattet. Jedes dieser Räder verfügt über einen Durchmesser von 51 Zentimetern und eine Breite von 40 Zentimetern. Die lediglich 0,75 Millimeter starken Laufflächen dieser Räder, auf denen das gesamte Gewicht des 899 Kilogramm schweren Rovers lastet, bestehen aus einer Aluminiumlegierung und sind mit verschiedenen Querrippen an den Oberseiten und Ringen an den Innenwänden verstärkt.
Bereits im Rahmen der ausführlichen Tests, welche im Vorfeld der Mission auf der Erde durchgeführt wurden, zeigte sich dass diese Räder bei ihrem Einsatz auf dem Mars nach einer gewissen Zeit verschiedene Beschädigungen wie zum Beispiel Dellen, aber auch Löcher und Risse aufweisen würden. Diese zu erwartenden Beschädigungen wurden von den für die Planung der Mission verantwortlichen Ingenieuren der NASA als für die Mission nicht bedrohlich eingeschätzt. Auch mit erheblich beschädigten Laufflächen, so zum Beispiel Matt Heverly, der Leiter des Roverdriver-Teams, welches für die Steuerung des Rovers verantwortlich ist, wird Curiosity auch weiterhin in der Lage sein, seine Fahrt fortzusetzen.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Und tatsächlich – schon nach wenigen Fahrten über die Marsoberfläche zeigten sich bereits im Jahr 2012 auf den Laufflächen der Räder einzelne Kratzer und Dellen. Während der letzten Wochen und Monate bildeten sich zudem verschiedene Löcher und teilweise mehrere Zentimeter lange Risse. Diese zuletzt vermehrt auftretenden Abnutzungserscheinungen resultieren laut den Einschätzungen der in die Mission eingebundenen Techniker und Ingenieure daraus, dass Curiosity speziell im vierten Quartal des Jahres 2013 ein Gelände überquerte, auf dessen felsigen Untergrund sich eine Vielzahl zwar nur wenige Zentimeter großer, dafür aber scharfkantiger Steine befand. Beim Überfahren dieser Steine traten dann die Mehrzahl der jetzt zu beobachtenden Beschädigungen auf.
Seit dem Dezember 2013 wurden mit den verschiedenen Kamerasystemen mehrfach ganze Serien von Aufnahmen angefertigt, mit denen der Zustand der Räder und deren Abnutzungserscheinungen dokumentiert und anschließend analysiert wurden. Dabei zeigte sich, dass speziell die vier mittleren und vorderen Räder beschädigt sind, während die beiden hinteren Räder nur geringe Abnutzungen aufweisen. Aus den so gewonnenen Daten soll jetzt eine Fahrweise entwickelt werden, durch welche die Räder möglichst geschont werden. Zur Diskussion stehen dabei zum Beispiel Fahrten im „Rückwärtsgang“ oder eine Fahrweise, bei der lediglich vier der sechs Räder aktiv angetrieben und zur Fortbewegung genutzt werden.
Auf jeden Fall werden die Roverdriver in Zukunft bemüht sein, für die durchzuführenden Fahrten ein Gelände auszuwählen, welches möglicht wenige dieser scharfkantigen Steine aufweist. Würde Curiosity jedoch auch weiterhin seinem eigentlich vorgesehenen Kurs folgen, dann müsste auch weiterhin eine Region passiert werden, wo solche Steine vermehrt auftreten. Dies war dann letztendlich auch der Grund für die Entscheidung der Fahrt zur Dingo Gap.
Hierbei handelt es sich um eine nur wenige Meter breite Lücke zwischen zwei ebenfalls nur wenige Meter hohen Steilböschungen. Hinter dieser Lücke, so die Analysen von verschiedenen hochaufgelösten Aufnahmen, welche der Marsorbiter Mars Reconnaissance Orbiter (MRO) mit seiner HiRISE-Kamera anfertigte, befindet sich dann ein Gelände, welches für Curiosity sehr wahrscheinlich deutlich weniger Steine parat halten dürfte.
Eine Sanddüne als potentielle Gefahr

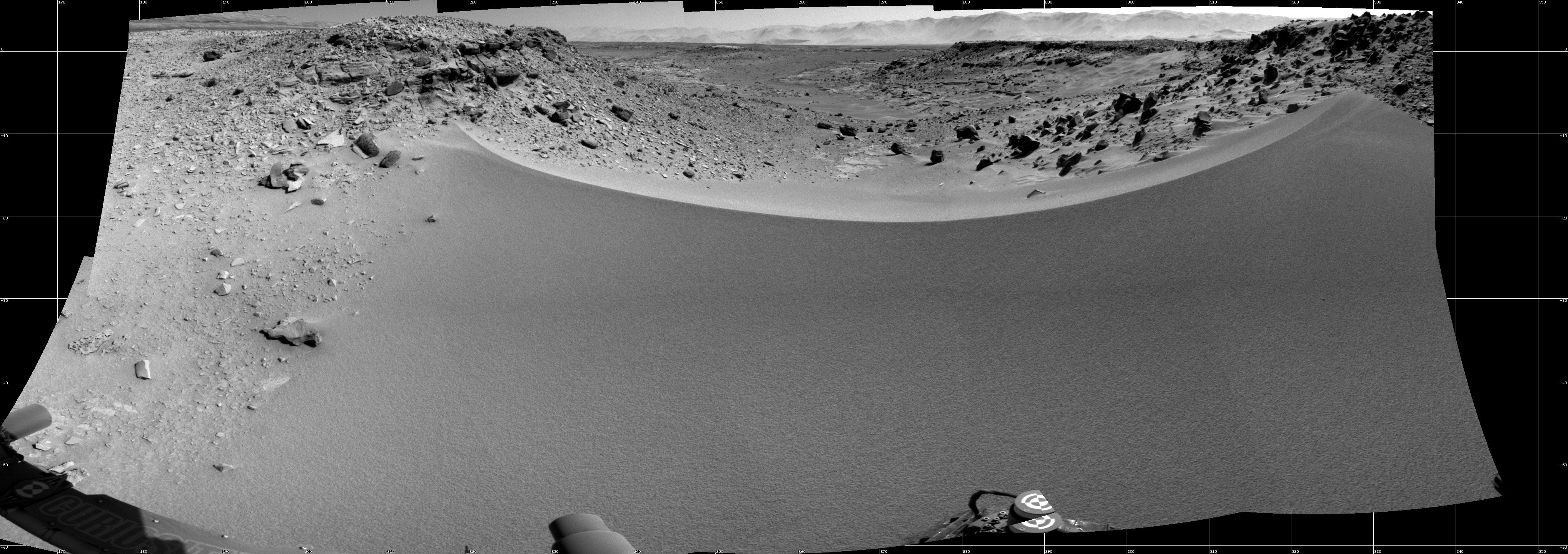
(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Um dieses Gebiet zu erreichen und anschließend zu durchfahren muss der Rover allerdings zunächst eine in ihrem Zentrum etwa einen Meter hohe Sanddüne passieren, welche die potentielle Durchfahrt bei der Dingo Gap versperrt. Diverse Aufnahmen, welche während der letzten Woche von dieser Sanddüne angefertigt wurden, werden derzeit ausgewertet und genutzt, um die Gefährlichkeit dieser Düne für den Rover einzuschätzen. Curiositys zwei Vorgänger, die ebenfalls von der NASA betriebenen Marsrover Spirit und Opportunity, haben in den vergangenen Jahren mehrfach negative Erfahrungen mit solche Dünen, welche sich als regelrechte „Sandfallen“ – aber auch als höchst interessante Forschungsziele – herausstellen können, gemacht.
Der Rover Opportunity fuhr sich zum Beispiel am 26. April 2005 in einer eigentlich harmlos aussehenden, nachträglich mit dem Namen „Purgatory-Dune“ (zu deutsch „Fegefeuer-Düne“) belegten Sanddüne fest und konnte erst nach fünf Wochen aus dieser misslichen Lage befreit werden (Raumfahrer.net berichtete). Opportunity ist immer noch aktiv und konnte erst vor wenigen Tagen seinen „Zehnten Geburtstag auf dem Mars“ feiern (Raumfahrer.net berichtete).

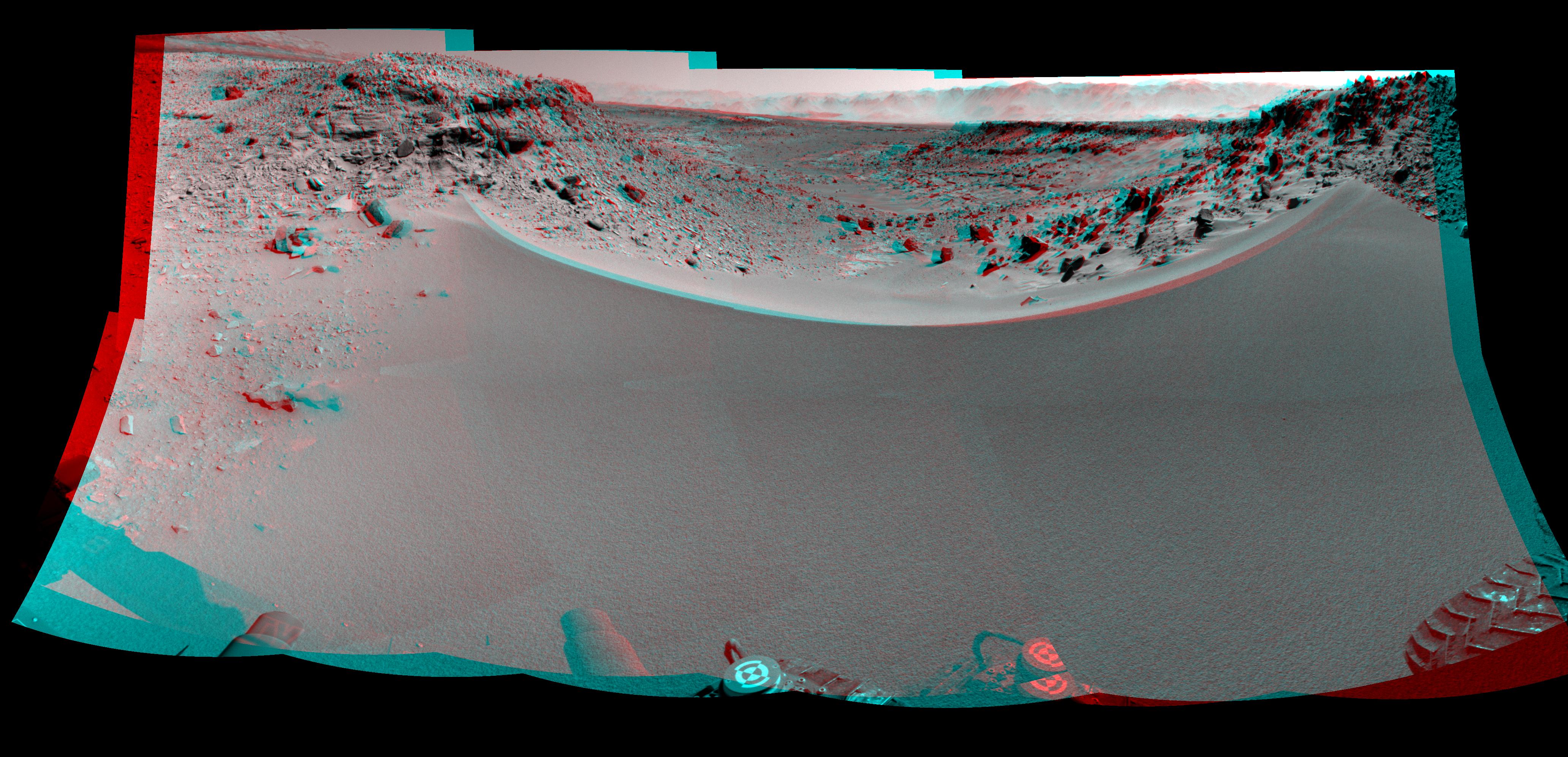
(Bild: NASA, JPL-Caltech)
Spirit hatte dagegen weniger Glück. Der Rover geriet im April 2009 in eine Region, wo sich unter einer nur wenige Zentimeter dicken versteinerten Kruste eine Schicht aus extrem feinem Sand und Staub befand. Am 23. April 2009 brach Spirit durch die dünne Kruste der Oberfläche und versank mit seinen zu diesem Zeitpunkt nur noch fünf funktionsfähigen Rädern tief im darunter befindlichen Sand und konnte trotz aller Bemühungen nicht mehr „befreit“ werden. Am 25. Mai 2011 gab die NASA schließlich bekannt, dass die Mission beendet wird (Raumfahrer.net berichtete).
Seit dem 26. Januar 2014 hat sich Curiosity weiter auf die Dingo Gap zugbewegt und dabei im Rahmen von vier Fahrten insgesamt etwa 90 Meter zurückgelegt. Der Rover befindet sich seit dem 30. Januar direkt am Rand der dort gelegenen Sanddüne und hat diese noch am selben Tag mit den drei auf der rechten Seite befindlichen Rädern teilweise „umgegraben“. In den kommenden Tagen sollen zunächst mehrere der insgesamt zehn wissenschaftlichen Instrumente des Rovers dazu eingesetzt werden, um das auf diese Weise frisch freigelegte Material auf seine chemische und mineralogische Zusammensetzung hin zu analysieren. Erst nach der Auswertung dieser Daten wird frühestens im Laufe der nächsten Woche entschieden, ob und an welcher Stelle Curiosity diese Düne wirklich überqueren soll.
„Die Entscheidung ist noch nicht gefallen“, so Jim Erickson vom JPL der NASA in Pasadena/Kalifornien, der Projektmanager der Curiosity-Mission. „Außerdem wollen wir einen Blick über die Düne in das Tal direkt westlich davon werfen, um zu sehen, ob der dortige Untergrund hier wirklich so gut ist, wie es die Aufnahmen aus dem Orbit heraus erwarten lassen.“
Die hochaufgelösten Aufnahmen der MastCam, der wissenschaftlichen Hauptkamera des Rovers, werden dabei deutlich bessere Aufnahmen liefern können als die HiRISE-Kamera des MRO, welche unter optimalen Bedingungen Oberflächenformationen auf dem Mars mit einer Auflösung von „lediglich“ etwa 25 Zentimetern pro Pixel abbilden kann.

(Bild: NASA, JPL-Caltech, Malin Space Science Systems)
Kurs Richtung Aeolis Mons
Wie auch immer die Entscheidung ausfallen wird – eine Fortsetzung der Fahrt über die Düne und danach die neu vorgesehene Route abfahren, zurück auf den alten Kurs oder die Suche nach einer weiteren alternativen Route – das angepeilte „Fernziel“ Aeolis Mons, die Basis des Inneren des Gale-Kraters gelegenen und etwa 5.500 Meter hohen Zentralberges, bleibt auch weiterhin bestehen. Sehr fraglich ist dabei allerdings, ob der eigentlich für die Ankunft vorgesehene Termin „August 2014“ eingehalten werden kann. Auf dem Weg zu dem angepeilten Ankunftspunkt am Fuße des Berges wird Curiosity auch weiterhin kurze Zwischenstopps einlegen.
Der nächste der dafür vorgesehenen „Waypoints“ – Bereiche im Inneren des Gale-Kraters, wo Curiosity jeweils mehrtägige Stopps für ausführlichere wissenschaftliche Untersuchungen einlegen soll – befindet sich in einer Entfernung von noch etwa 800 Metern in südwestlicher Richtung. Das wissenschaftliche Ziel der Analysen an den „Waypoints“ besteht darin, Informationen über die Geologie des Geländes zu sammeln, welches sich zwischen der Region Shaler und dem Aeolis Mons befindet.
Diese Daten sollen den Wissenschaftlern dabei helfen, die bisher gewonnenen Informationen in einen Kontext zu den Erkenntnissen zu setzen, welche zukünftig bei den geschichteten Gesteinsablagerungen des Zentralberges erlangt werden. Ein spezielles Augenmerk soll dabei auf geologische Strukturen gerichtet werden, welche offensichtlich durch fließendes Wasser erzeugt beziehungsweise verändert wurden. Um den nächsten Punkt, welcher mit dem Namen „KMS-9“ belegt wurde, zu erreichen wird Curiosity allerdings deutlich mehr als diese 800 Meter Luftlinie überbrücken müssen.
(Bild: NASA, JPL-Caltech)
„Im Bereich von KMS-9 zeigen die Orbitaufnahmen drei verschiedene Geländetypen und eine relativ staubfreie Oberfläche“, so Katie Stock vom California Institute of Technology (CIT), eine der an der Mission beteiligten Wissenschaftlerinnen. „Wir erkennen dort Geländeformen, denen wir mit Curiosity zuvor noch nicht begegnet sind. An einer Stelle sind Riefelungen auf der Oberfläche zu sehen, die alle in die gleiche Richtung zeigen. Andere Bereiche erscheinen glatt und es existieren keine Riefelungen. Wir wissen nicht, was das ist. Aber das ist gerade so spannend an dieser Erkundungsmission – wir sehen immer wieder neue Dinge.“
Eventuell, so die derzeitigen Überlegungen, wird in der Umgebung von KMS-9 auch erneut das Bohrsystem des Rovers dazu eingesetzt, um eine weitere Bodenprobe zu entnehmen und anschließend mit den Analyseinstrumenten eingehender zu untersuchen.
(Bild: NASA, JPL-Caltech)
Bis zum heutigen Tag, dem „Sol“ 530 seiner Mission, hat der Marsrover Curiosity eine Distanz von mehr als 4.900 Metern auf der Oberfläche des Mars zurückgelegt. Seit dem Erreichen unseres Nachbarplaneten haben die Kamerasysteme von Curiosity zudem mehr als 116.570 Bilder aufgenommen und an das Roverkontrollzentrum des Jet Propulsion Laboratory (JPL) in Pasadena/Kalifornien übermittelt. Diese Aufnahmen sind für die interessierte Öffentlichkeit auf einer speziellen Internetseite des JPL einsehbar.
Verwandte Meldungen bei Raumfahrer.net:
- Marsrover Curiosity ändert den Kurs (25. Januar 2014)
- Marsorbiter MRO fotografiert Curiositys Radspuren (10. Januar 2014)
- Curiosity: Software-Upgrade und Überprüfung der Räder (22. Dezember 2013)
- Curiosity: Messung der Strahlenbelastung auf dem Mars (11. Dezember 2013)
- Marsrover Curiosity: Neue Erkenntnisse der Mission (10. Dezember 2013)
- Curiositys ChemCam: Über 100.000 Laserpulse (9. Dezember 2013)
- Curiosity hat seine Arbeit wieder aufgenommen (26. November 2013)
Diskutieren Sie mit im Raumcon-Forum:
Verwandte Seiten bei Raumfahrer.net: